1. Eu (Clientul), sunt de acord cu prelucrarea datelor mele personale primite de la mine în cursul trimiterii unei cereri de servicii de informare și consultanță/admitere la formare în programe educaționale.
2. Confirm că numărul de telefon mobil pe care l-am furnizat este numărul meu personal de telefon care mi-a fost atribuit de operatorul de telefonie mobilă și sunt gata să fiu tras la răspundere pentru orice consecințe negative cauzate de furnizarea de către mine a unui număr de telefon mobil aparținând altei persoane.
Grupul de companii include:
1. OOO MBSh, adresa legală: 119334, Moscova, prospect Leninsky, 38 A.
2. ANO DPO „ȘCOALA DE AFACERI LA MOSCOVA”, adresa juridică: 119334, Moscova, prospect Leninsky, 38 A.
3. În cadrul acestui acord, „date cu caracter personal” înseamnă:
Date personale pe care Clientul le furnizează despre sine în mod conștient și independent la completarea unei Aplicații de instruire/primire de informații și servicii de consultanță pe paginile Site-ului Grupului de Firme
(și anume: prenume, prenume, patronimic (dacă există), anul nașterii, nivelul de studii al Clientului, programul de formare ales, orașul de reședință, numărul de telefon mobil, adresa de e-mail).
4. Client - o persoană fizică (o persoană care este reprezentantul legal al unei persoane cu vârsta sub 18 ani, în conformitate cu legislația Federației Ruse) care a completat o Cerere de instruire / pentru primirea de servicii de informații și consultanță privind Site-ul Grupului de Firme, exprimându-și astfel intenția de a utiliza serviciile de educație/informare și consultanță ale Grupului de Firme.
5. Grupul de companii nu verifică în general acuratețea datelor cu caracter personal furnizate de Client și nu exercită control asupra capacității sale juridice. Cu toate acestea, Grupul de Companii presupune că Clientul oferă informații personale de încredere și suficiente cu privire la aspectele propuse în formularul de înregistrare (Formular de cerere), și menține aceste informații la zi.
6. Grupul de companii colectează și stochează doar acele date cu caracter personal care sunt necesare pentru admiterea la formare/primirea serviciilor de informare și consultanță de la Grupul de companii și organizarea prestării de servicii educaționale/informative și de consultanță (executarea acordurilor și contractelor cu Client).
7. Informațiile colectate vă permit să trimiteți informații sub formă de e-mailuri și mesaje SMS prin canale de comunicare (distribuție SMS) la adresa de e-mail și numărul de telefon mobil specificate de Client în scopul primirii de servicii pentru Grup al Companiilor, organizarea procesului educațional, transmiterea de notificări importante, cum ar fi modificări ale termenilor, condițiilor și politicilor Grupului de Companii. De asemenea, astfel de informații sunt necesare pentru a informa cu promptitudine Clientul cu privire la toate modificările condițiilor de furnizare a serviciilor de informare și consultanță și organizarea procesului de educație și admitere la formare în Grupul de Firme, informând Clientul despre promoțiile viitoare, viitoarele evenimente si alte evenimente ale Grupului de Firme, prin transmiterea acestuia de mail-uri si mesaje informative, precum si in scopul identificarii partii in temeiul acordurilor si contractelor cu Grupul de Firme, comunicarii cu Clientul, inclusiv transmiterii de notificari, solicitari si informatii. privind prestarea serviciilor, precum și procesarea cererilor și cererilor de la Client.
8. Atunci când lucrează cu datele personale ale Clientului, Grupul de Companii este ghidat de Legea Federală a Federației Ruse nr. 152-FZ din 27 iulie 2006. „Despre datele personale”.
9. Sunt informat că în orice moment pot refuza să primesc informații la adresa de e-mail prin trimiterea unui e-mail la adresa:. De asemenea, este posibil să refuzați în orice moment să primiți informații prin e-mail făcând clic pe linkul „Dezabonare” din partea de jos a scrisorii.
10. Am fost informat că în orice moment pot refuza să primesc un mesaj SMS la numărul de telefon mobil specificat, trimițând un e-mail la adresa:
11. Grupul de companii ia măsurile organizatorice și tehnice necesare și suficiente pentru a proteja datele personale ale Clientului împotriva accesului neautorizat sau accidental, distrugerii, modificării, blocării, copierii, distribuirii, precum și împotriva altor acțiuni ilegale ale terților cu aceasta.
12. Legislația Federației Ruse se aplică acestui acord și relației dintre Client și Grupul de Companii care decurg din aplicarea acordului.
13. Prin acest acord, confirm că am peste 18 ani și accept condițiile specificate în textul acestui acord și, de asemenea, îmi dau consimțământul voluntar deplin pentru prelucrarea datelor mele personale.
14. Prezentul acord care guvernează relația dintre Client și Grupul de Companii este valabil pe întreaga perioadă de furnizare a Serviciilor și accesul Clientului la serviciile personalizate ale Site-ului Grupului de Companii.
SRL MBSH adresa legală: 119334, Moscova, prospect Leninsky, 38 A.
LLC MBSh Consulting Adresă juridică: 119331, Moscova, Vernadsky prospect, 29, birou 520.
CHUDPO "ȘCOALA DE AFACERI A MOSCOVĂ - SEMINARE", adresa juridică: 119334, Moscova, prospect Leninsky, 38 A.
scopul muncii
Pentru a se familiariza cu construcția sistemelor de control extreme în trepte atunci când se controlează cu întârziere obiectele dinamice.
Partea teoretică
În orice producție (la o fabrică, o combină) există un anumit indicator tehnic și economic (TEP), care caracterizează pe deplin eficiența acestei producții. Este benefic să mențineți acest indicator de conducere la o valoare extremă. Un astfel de indicator generalizat poate fi profitul întreprinderii.
Pentru toate procesele tehnologice (în ateliere, departamente) care fac parte din producție, pe baza TPE-ului lider, vă puteți formula propriul TPE privat (de exemplu, costul unei unități de producție la o anumită productivitate). La rândul său, procesul tehnologic poate fi de obicei împărțit într-un număr de secțiuni (unități tehnologice), pentru fiecare dintre acestea criteriul optimității Q . Realizarea extremumului Q va aduce TP-ul privat al procesului și TP-ul lider al producției mai aproape de extrem.
Criteriul de optimizare Q poate fi direct orice parametru tehnologic (de exemplu, temperatura flăcării unui dispozitiv de ardere) sau o funcție care depinde de parametrii tehnologici (de exemplu, eficiența, efectul termic al reacției, randamentul unui produs util pentru o anumită perioadă de timp etc. .) ).
Dacă criteriul de optimitate Q este o funcție a unor parametri ai obiectului, apoi un sistem de reglare extremă (ERM) poate fi utilizat pentru a optimiza acest obiect.
În cazul general, valoarea criteriului de optimitate depinde de modificările unui număr de parametri de intrare ai obiectului. Există multe obiecte de control pentru care valoarea criteriului de optimitate Q depinde în principal de modificarea unui parametru de intrare. Exemple de astfel de obiecte sunt diferite tipuri de cuptoare, reactoare catalitice, tratarea chimică a apei la centralele termice și multe altele.
Deci, sistemele de control extreme sunt concepute pentru a căuta valori optime ale acțiunilor de control, adică. astfel de valori care oferă extremul unui criteriu Q optimitatea procesului.
Sistemele de control extrem, care sunt concepute pentru a optimiza un obiect folosind un canal de intrare, sunt numite cu un singur canal. Astfel de SED sunt cele mai răspândite.
La optimizarea obiectelor cu inerție semnificativă și întârziere pură, este recomandabil să se utilizeze sisteme de trepte extreme care afectează intrarea controlată a obiectului la intervale de timp discrete.
Când se studiază un sistem extrem, obiectul de optimizare în cele mai multe cazuri este reprezentat convenabil printr-o conexiune în serie de trei legături: o legătură inerțială liniară de intrare, o caracteristică statică extremă la = F(NS) și legătura inerțială liniară de ieșire (Fig. 1). Un astfel de circuit echivalent structural poate fi denumit LNL.
Orez. 1Schema de obiecte extreme LNL
Este convenabil să luăm factorii de câștig ai ambelor legături liniare egale cu unitatea. Dacă inerția legăturii liniare de intrare este neglijabilă în comparație cu inerția legăturii liniare de ieșire, obiectul poate fi reprezentat prin circuitul echivalent al NL; dacă inerția legăturii liniare de ieșire este neglijabilă, - prin circuitul echivalent al LN. Proprietățile inerțiale intrinseci ale unui obiect sunt de obicei reprezentate de o legătură inerțială de ieșire; inerţia aparatelor de măsură ale sistemului aparţine aceleiaşi verigi.
O legătură liniară de intrare apare de obicei în diagrama structurală a unui obiect atunci când mecanismul executiv (MI) al unui sistem extrem acționează asupra obiectului de optimizare însuși printr-o legătură cu inerție, de exemplu, dacă parametrul de intrare al obiectului optimizat este temperatura , iar MI afectează schimbarea acestuia prin schimbătorul de căldură. Inerția actuatorului se referă și la partea liniară de intrare.
Trebuie remarcat faptul că în majoritatea covârșitoare a cazurilor este imposibil să se măsoare coordonatele obiectului de control intermediar între legăturile liniare și neliniare; acest lucru este ușor de realizat doar prin modelarea sistemului.
În unele cazuri, este posibil să se determine circuitul echivalent structural al unui obiect doar experimental.
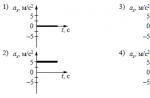
Pentru a face acest lucru, modificați coordonatele de intrare a obiectului v 1, corespunzătoare valorii de ieșire z 1 , inainte de v 2 (fig. 2, A), la care valoarea coordonatei de ieșire a obiectului ca rezultat al procesului tranzitoriu va fi aproximativ egală cu z 1 .
Dacă această perturbare practic nu a provocat nicio modificare vizibilă a coordonatei de ieșire a obiectului (Fig. 2, b), atunci legătura inerțială de intrare este absentă. Dacă procesul tranzitoriu ca urmare a unei astfel de perturbări are o formă care este calitativ apropiată de cea prezentată în Fig. 2, v, atunci legătura inerțială la intrarea obiectului există.

Orez. 2Caracteristici extreme ale amplificatorului operațional
Structura obiectelor CL și LN, în care partea liniară este descrisă printr-o ecuație diferențială de ordinul întâi cu sau fără întârziere și caracteristica statică y = f(X) poate fi orice funcție continuă cu un extrem în domeniul de operare; se poate aproxima un număr suficient de mare de obiecte industriale de optimizare.
Sisteme de control extrem:
Sisteme automate de optimizare cu memorarea extremului
În controlerele extreme SAO cu memorarea extremului, diferența dintre valoarea curentă a semnalului de ieșire este alimentată la releul de semnal la obiectul și valoarea acestuia la momentul anterior în timp.
Diagrama structurală a SAO cu memorarea extremului este prezentată în Fig. 3 . Mărimea ieșirii obiectului O cu caracteristică statică y = f(NS) alimentat la dispozitivul de stocare Memorie regulator extrem.

Orez. 3Sistem automat de optimizare cu memorarea extremului
Dispozitivul de memorie al unui astfel de sistem ar trebui să înregistreze doar creșterea semnalului de intrare, adică. memorarea are loc numai la crestere la. A reduce la dispozitivul de stocare nu răspunde. Semnalul de la dispozitivul de stocare este alimentat continuu la elementul de comparație ES, unde este comparat cu valoarea semnalului curent la. Semnal de diferență la-la max de la elementul de comparație se duce la releul de semnal mier Când diferența la-y max atinge valoarea zonei moarte u n releu de semnal, inversează actuatorul LOR, care afectează semnalul de intrare NS obiect. După activarea releului de semnal, memorat de dispozitivul de stocare Memorie sens y resetarea și stocarea semnalului laîncepe din nou.
Sistemele cu memorarea unui extremum au de obicei actuatoare cu o viteză constantă de mișcare, i.e. dx / dt = ± k 1 Unde k= const. In functie de semnal și releu de semnal actuatorul schimba directia de miscare.
Să explicăm munca CAO cu memorarea extremului. Să presupunem că în acest moment t 1 (Fig. 4), când starea obiectului este caracterizată de valorile semnalelor la intrare și respectiv la ieșire NS 1 și la 1 (punct M 1), regulatorul extrem este inclus în lucrare. În acest moment, dispozitivul de memorie stochează semnalul la 1 . Să presupunem că regulatorul extrem, după ce l-a pus în funcțiune, a început să crească valoarea NS,în timp ce valoarea la scade - dispozitivul de stocare nu răspunde la aceasta. Ca rezultat, un semnal apare la ieșirea releului de semnal la-la 1 . Pe moment t semnal la-la 1 ajunge în zona moartă a releului de semnal u n(punct M 2), care se declanşează prin inversarea servomotorului. După aceea, valoarea memorată la 1 este resetat și memoria stochează noua valoare la 2 . Semnal de intrare obiect NS scade şi semnalul de ieşire la crește (traiectoria de la punct M 2 La M 3). În măsura în care la crescând tot timpul, producția Memorie urmărește continuu schimbarea la.

Orez. 4Căutați optimul în SAO cu memorarea extremului:
A- caracteristicile obiectului; b- modificarea ieșirii obiectului; v- semnal la intrarea semnalului-releu; G- schimbarea intrării obiectului.
La punctul M 3 sistemul ajunge la o extremă, dar o scădere NS continuă. În consecință, după punct M 3 sens la este deja în scădere și Memorieîşi aminteşte y Max. Intrare releu Signum acum mier semnalul de diferență apare din nou a-a max. La punctul M 4 , cand y 4 -y max = y n, releul de semnal este declanșat, inversând servomotorul și resetând valoarea stocată y max, etc.
Oscilațiile sunt stabilite în jurul extremului valorii controlate. Din fig. 4 se poate observa că perioada de fluctuaţii a intrării Staniu obiectul este de 2 ori mai mare decât perioada de oscilație a ieșirii obiectului T out. Releul Signum inversează IM când y=y max - y n. Direcția mișcării MI după declanșarea releului de semnal depinde de direcția de mișcare a MI înainte de declanșarea releului de semnal.
Dintr-o examinare a activității CAO cu memorarea extremului, este clar că numele său nu reflectă cu exactitate esența funcționării sistemului. Dispozitivul de memorie nu înregistrează extremul caracteristicilor statice ale obiectului (valoarea acestuia în momentul în care regulatorul este pornit este necunoscută). Dispozitivul de memorie captează valorile cantității de ieșire la obiect când la crește.
Sisteme de optimizare automată de tip treptat
Schema bloc a SAO în trepte este prezentată în Fig. 5. Măsurarea semnalului de ieșire la obiectul din sistem apare discret (în spatele senzorului de ieșire a obiectului există un element de impuls IE 1), adică la anumite intervale ∆ t(∆t este perioada de repetare a elementului de impuls). Astfel, elementul de impuls convertește semnalul de ieșire în schimbare la obiect într-o succesiune de impulsuri, a căror înălțime este proporțională cu valorile la câteodată t = n∆t, numite momente de preluare. Să desemnăm valori laîn acest moment t = n∆t peste la p. Valorile la n sunt alimentate în memoria dispozitivului de memorie (element de întârziere). Dispozitivul de stocare alimentează elementul de comparație ES valoarea anterioară y n- 1 . Pe ES in acelasi timp intra y n... La ieșirea elementului de comparație, un semnal al diferenței ∆y n = y n - y n- 1 În clipa următoare t=(n+1) ∆t valoarea memorată de captare a semnalului y n- 1 este resetat din memorie și semnalul este stocat y n + 1 , un semnal la n vine de la Memorie pe ES iar la intrarea releului de semnal mier apare semnalul ∆ y n + 1 = y n + 1 -y n.

Orez. 5Structură discretă(pășind)SAO
Deci, un semnal proporțional cu incrementul Δ la ieșirea obiectului pentru intervalul de timp ∆ t. Dacă ∆ y> 0 atunci o astfel de mișcare este permisă de releul de semnal; dacă ∆ la<0, apoi releul de semnal preia și schimbă direcția semnalului de intrare NS.
Între Signum Relay mierși actuatorul LOR(fig. 5) este inclus încă un element de impuls IE 2 (lucru în sincronizare cu IE 1), care deschide periodic circuitul de putere LOR, oprire LOR de data asta.
Actuatorul din astfel de CAO implementează de obicei o modificare a intrării NS obiect în trepte cu o valoare constantă ∆х. Este recomandabil să schimbați rapid semnalul de intrare al obiectului cu un pas, astfel încât timpul de mișcare a actuatorului cu un pas să fie destul de scurt. În acest caz, perturbațiile introduse în obiect de către actuator se vor apropia de cele abrupte.
Astfel, releul de semnal schimbă direcția pasului următor ∆ x n + 1 a actuatorului, dacă valoarea lui ∆ la n devine mai mică decât zero.
Să luăm în considerare natura căutării unui extremum într-un SAO treptat cu un obiect fără inerție. Să presupunem că starea inițială a obiectului este caracterizată de punctul M 1 pe dependența statică y = f(X) (Fig. 6, a). Să presupunem că regulatorul extrem este pornit în momentul de față t 1 iar actuatorul face un pas ∆ NS pentru a crește semnalul de intrare al obiectului.

Orez. 6Căutați în CAO discret: A - caracteristicile obiectului; b- modificarea ieșirii; v- modificați intrarea
Semnal la ieșirea obiectului la crește și el. După un timp ∆ t(la momentul de timp t 2) actuatorul face un pas în aceeași direcție, deoarece ∆ la 1 = y 2 -y 1> 0. Pe moment t 3 actuatorul mai face un pas cu ∆ NSîn aceeași direcție, deoarece ∆ y 2 =y 3 -y 2 este mai mare decât zero etc. La timp t 5 incrementul semnalului de ieșire al obiectului ∆ y 3 =y 5 -y 4 , devine mai mică decât zero, releul de semnal este activat și următorul pas ∆ NS actuatorul va face in sensul scaderii semnalului de intrare al obiectului NS etc.
În trepte SAO, pentru a asigura stabilitatea, este necesar ca mișcarea sistemului până la extremum să fie nemonotonă.
Există CAO-uri stepper, la care modifică semnalul de intrare într-un singur pas ∆ NS variabilă și depinde de valoare y.
Sisteme de optimizare automată cu control derivat
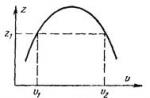
Sistemele de optimizare automată cu control derivat utilizează proprietatea caracteristicii statice extreme pe care derivata dy / dx egal cu zero la valoarea semnalului de intrare al obiectului x = x opt(vezi fig. 7).

Orez. 7Graficul modificării derivatei caracteristicii unimodale
Diagrama bloc a unuia dintre aceste CAO este prezentată în Fig. 8. Valorile semnalelor de intrare și de ieșire ale obiectului O sunt alimentate la doi diferențiatori D 1 și D 2, la ieșirea cărora se obțin semnale, respectiv dx / dtși dy / dt. Semnalele derivate sunt trimise către divizor DU.

Orez. optStructura SAO cu măsurarea derivatei caracteristicii statice
La iesire DU semnalul este primit dy / dx, care este alimentat la amplificator Avea cu câștig k 2. Semnalul de la ieșirea amplificatorului ajunge la actuator LOR cu viteză variabilă de mișcare, a cărei valoare este proporțională cu semnalul de ieșire al amplificatorului și. Câştig LOR este egal cu k 1 .
Dacă caracteristicile statice ale obiectului y = f(X) parabolic y = -kx 2 , atunci SAO este descris prin ecuaţii liniare (în absenţa perturbaţiilor), întrucât dy / dx =-2kx, iar restul legăturilor sistemului sunt liniare. Un dispozitiv logic pentru determinarea direcției de mișcare către un extremum într-un astfel de sistem nu este aplicat, deoarece este pur liniar și în el, s-ar părea, valoarea extremului este cunoscută dinainte (deoarece dy / dx = 0 pentru x = x oiit).
La momentul includerii CAO în lucrul asupra LOR se dă ceva semnal pentru a-l pune în mișcare, în caz contrar dx / dt = 0 și dy / dt = 0 (în absența unor perturbări aleatorii). După aceea, CAO funcționează ca un ATS obișnuit, în care sarcina este valoarea dy / dx = 0.
Sistemul descris are o serie de dezavantaje care îl fac practic să nu fie folositor. În primul rând, pentru dx / dt → 0 derivat dy / dt de asemenea, tinde spre zero - problema găsirii extremului devine nedefinită. În al doilea rând, obiectele reale au o întârziere, deci este necesar să se împartă între ele derivatele care nu sunt măsurate simultan dy / dtși dx / dt,și deplasat în timp exact în timpul întârzierii semnalului în obiect, care este destul de dificil de realizat. În al treilea rând, absența unui dispozitiv logic (releu de semnal) într-un astfel de CAO duce la faptul că în unele condiții sistemul își pierde performanța. Să presupunem că CAO a fost inclus în lucrare când X
În plus, chiar dacă un astfel de sistem la momentul inițial se deplasează la un extrem, atunci își pierde operabilitatea cu o deviere arbitrar mică a caracteristicii statice fără un comutator de inversare de verificare.

Orez. nouăSistem de optimizare cu măsurarea derivatei ieșirii obiectului:
A - structura sistemului; b- caracteristicile obiectului; v- modificarea ieșirii; G- semnal la intrare, d - schimbând intrarea obiectului.
Luați în considerare un alt tip de CAO cu o măsurătoare derivată și un actuator LOR viteză constantă de mișcare, a cărei diagramă structurală este prezentată în Fig. nouă.
Să luăm în considerare natura căutării extremului SAO cu măsurarea derivatei cu diagrama structurală prezentată în Fig. nouă, A.
Fie obiectul inerțial al reglementării O(Fig. 9, a) are o caracteristică statică prezentată în Fig. nouă, b... Starea CAO în momentul pornirii controlerului extrem este determinată de valorile semnalelor de intrare X 1 si iesi la 1 - punct M 1 pe o caracteristică statică.
Să presupunem că controlerul extremal după ce l-a pornit la momentul respectiv t 1 modifică semnalul la intrare NSîn sus. În acest caz, semnalul la ieșirea obiectului la se va modifica în conformitate cu caracteristica statică (Fig. 9, v), și derivata dy / dt când se deplasează din punct M 1 inainte de M 2 scade (Fig. 9, G). La un moment dat t 2 ieșirea obiectului va atinge o extremă la max, iar derivata dy / dt va fi zero. Datorită insensibilității releului de semnal, sistemul va continua să se miște, îndepărtându-se de extremum. Mai mult, derivatul dy / dt va schimba semnul și va deveni negativ. Pe moment t 3 , când valoarea dy / dt, rămas negativ, va depăși zona moartă a releului de semnal ( dy / dt)H, va exista o inversare a actuatorului și a semnalului de intrare NS va începe să scadă. Ieșirea obiectului va începe să se apropie din nou de extremum și de derivată dy / dt devine pozitiv atunci când se deplasează din punct M 3 inainte de M 4 (fig. 9, v). La un moment dat t 4, semnalul de la ieșire ajunge din nou la extrem, iar derivata dy / dt = 0.
Cu toate acestea, din cauza insensibilității releului de semnal, mișcarea sistemului va continua, derivată dy / dt devine negativ și la punct M 5 se va inversa din nou etc.
În acest sistem, este diferențiat doar semnalul de ieșire al obiectului, care este alimentat releului de semnal mier De când sistemul trece prin extremum, semnul dy / dt modificări, apoi pentru a găsi extremul, trebuie să inversați LOR, când derivatul dy / dt va deveni negativ și va depăși zona moartă ( dy / dt)H releu de semnal.
Sistem sensibil la semne dy / dt, conform principiului de funcționare, este aproape de pasul CAO, dar mai puțin imun la zgomot.
Sisteme de optimizare automată cu modulare auxiliară
În unele lucrări, astfel de sisteme automate de optimizare sunt numite sisteme cu semnal de căutare continuă sau, în terminologia A.A. Krasovsky pur și simplu prin sisteme continue de reglare extremă.
În aceste sisteme, proprietatea caracteristicii statice este utilizată pentru a schimba faza de oscilații a semnalului de ieșire al obiectului în comparație cu faza oscilațiilor de intrare a obiectului cu 180 ° atunci când semnalul de ieșire al obiectului trece prin extremum (vezi Fig. 10).

Orez. zeceNatura trecerii vibrațiilor armonice prin caracteristica unimodală
Spre deosebire de sistemele CAO de mai sus cu modulație auxiliară, au mișcări separate de căutare și de lucru.
Schema bloc a SAO cu modulație auxiliară este prezentată în Fig. 11. Semnal de intrare NS obiect O cu caracteristică y = f(X) este suma a doua componente: x = x o(t)+A păcat ω 0 t, Unde Ași ω 0 - valori constante. Componentă A păcat ω 0 t este o rulare de probă și este generată de generator G, componentă x o(t) este o mișcare muncitorească. Când se trece la un extrem, componenta variabilă A păcat ω 0 t semnalul de intrare al obiectului determină apariția unei componente alternative de aceeași frecvență ω 0 =2π / T 0 în semnalul de ieşire al obiectului (vezi Fig. 10). Componenta variabilă poate fi găsită grafic, așa cum se arată în Fig. zece.

Orez. unsprezeceStructura CAO cu modulație auxiliară
Este evident că componenta variabilă a semnalului la ieșirea obiectului coincide în fază cu componenta variabilă a semnalului la intrare pentru orice valoare de intrare, când X 0 = x 1
Amplitudine A fluctuațiile de căutare ar trebui să fie mici, deoarece aceste fluctuații trec în semnalul de ieșire al obiectului și conduc la erori în determinarea extremului.
Componenta cantitativă y, avand frecventa ω 0, evidențiat de un filtru trece-bandă F 1 (fig. 11). Sarcina de filtrare F 1 constă în a nu trece o componentă constantă sau care se schimbă lent și componente ale armonicii secunde și superioare. În cazul ideal, filtrul ar trebui să treacă doar componenta cu frecvența ω 0.
După filtru F 1 componenta variabila a cantitatii y, avand frecventa ω 0, alimentat la multiplicator MH(detector sincron). O valoare de referință este, de asemenea, introdusă la intrarea multiplicatorului v 1 =A păcat ( ω 0 t + φ ). Fază φ tensiune de referință v 1 selectat în funcție de faza ieșirii filtrului F 1 , deoarece filtrul Ф 1 introduce o schimbare de fază suplimentară.
Tensiunea de ieșire a multiplicatorului u = vv 1 . Când valoarea X<X angro
u = vv 1 = b păcat ( ω 0 t+ φ ) A păcat ( ω 0 t+ φ ) = ab păcatul 2 ( ω 0 t + φ )= = ab / 2 .
Când valoarea semnalului la intrare X>NS Valoarea semnalului 0PT la ieșirea multiplicatorului MH este:
și = vv 1 = b păcat ( ω 0 t + φ + 180 °) A păcat ( ω 0 t + φ ) = - ab păcatul 2 ( ω 0 t + φ )= = - ab / 2 .

Orez. 12Caracter de căutare în CAO cu modulare auxiliară:
A - caracteristicile obiectului; b-schimbarea fazei oscilaţiilor; v- oscilaţii armonice la intrare; G- semnal total la intrare; d - semnal la ieșirea multiplicatorului.
După multiplicator, semnalul și alimentat la filtrul trece-jos F 2, care nu trece de componenta AC a semnalului și. componenta DC a semnalului și = și 1 dupa filtru F 2 este alimentat la elementul releu RE. Elementul releu controlează actuatorul la o viteză de deplasare constantă. În locul unui element releu, circuitul poate avea un amplificator sensibil la fază; atunci actuatorul va avea o viteza de deplasare variabila.
În fig. 12 prezintă natura căutării unui extremum în SAO cu modulație auxiliară, a cărei diagramă bloc este prezentată în Fig. 11. Să presupunem că starea inițială a sistemului este caracterizată de semnale la intrarea și respectiv la ieșirea obiectului NS 1 și y 1 (punct M 1 în fig. 12, a).
Din moment ce la punctul M 1 sens X 1 <х опт atunci când regulatorul extrem este pornit, fazele oscilațiilor de intrare și de ieșire vor coincide. Să presupunem că în acest caz componenta constantă la ieșirea filtrului F 2 este pozitiv ( ab/ 2> 0), care corespunde mișcării cu creștere NS, adică dx 0 / dt> 0.În acest caz, SAO se va muta la extrem.
Dacă punctul de plecare M 2, care caracterizează poziția sistemului în momentul pornirii controlerului extrem, este astfel încât semnalul de intrare al obiectului X>X opt (Fig. 12, a), atunci oscilațiile semnalelor de intrare și de ieșire ale obiectului sunt în antifază. Ca rezultat, componenta constantă la ieșire F 2 va fi negativ ( ab/2<0), что вызовет движение системы в сторону уменьшения NS (dx 0 / dt<0 ). În acest caz, CAO se va apropia de extremum.
Astfel, indiferent de starea inițială a sistemului, se va asigura căutarea unui extremum.
În sistemele cu un actuator cu viteză variabilă, viteza de mișcare a sistemului până la extrem va depinde de amplitudinea oscilațiilor de ieșire ale obiectului, iar această amplitudine este determinată de abaterea semnalului de intrare. NS din sens NS angro
Trimiteți-vă munca bună în baza de cunoștințe este simplu. Utilizați formularul de mai jos
Studenții, studenții absolvenți, tinerii oameni de știință care folosesc baza de cunoștințe în studiile și munca lor vă vor fi foarte recunoscători.
Postat pe http://www.allbest.ru/
1. Sisteme de control extrem
Sistemele de control extrem sunt astfel de ACS, în care unul dintre indicatorii de performanță trebuie menținut la nivelul maxim (min sau max).
Un exemplu clasic de sistem de control extrem este sistemul de control automat al frecvenței unui receptor radio.
Figura 1.1 - Răspuns amplitudine-frecvență:
1.1 Enunțarea problemei sintezei sistemelor extreme
Obiectele sunt descrise prin ecuații:
Caracteristica extremă derivă în timp.
Este necesar să selectați o acțiune de control care să găsească automat extremul și să mențină sistemul în acest punct.
U: extr Y = Y o (1,2)
Figura 1.2 - Caracteristica extremă statică:
Este necesar să se determine o astfel de acțiune de control care a asigurat performanța proprietății:
1.2 Stare extremă
O condiție necesară pentru un extremum este egalitatea cu zero a primelor derivate parțiale.
O condiție suficientă pentru un extremum este egalitatea cu zero a derivatelor a doua parțiale. Atunci când se sintetizează un sistem extrem, este necesar să se estimeze gradientul, dar vectorul derivatelor parțiale a doua nu poate fi estimat, iar în practică, în loc de o condiție suficientă pentru un extremum, se folosește următoarea relație:
Etapele sintezei unui sistem extrem:
Estimarea gradientului.
Organizarea mișcării în conformitate cu condiția mișcării până la extrem.
Stabilizarea sistemului la punctul extrem.
Figura 1.3 - Diagrama funcțională a unui sistem extrem:
1.3 - Tipuri de caracteristici extreme
1) Caracteristica extremă unimodală a tipului de modul
Orez. 1.4 - Caracteristica extremă a tipului de modul:
2) Caracteristica extremă a tipului parabolă
Orez. 1.5 - Caracteristica extremă a tipului parabolă:
3) În cazul general, caracteristica extremă poate fi descrisă printr-o parabolă de ordinul al n-lea:
Y = k 1 | y-y o (t) | n + k 2 | y-y o (t) | n -1 +… + k n | y-y o (t) | + k n +1 (t) (1,9)
4) Reprezentare vector-matrice:
Y = y T Prin (1,10)
1.4 Metode de estimare a gradientului
1.4.1 Metoda de împărțire a derivatelor
Să o considerăm pe o caracteristică unimodală, y este rezultatul părții dinamice a sistemului.
yR 1, Y = Y (y, t)
Găsiți derivata timpului total:
În derivă încet în acest fel
Demnitate: simplitate.
Dezavantaj: la 0 mici, gradientul nu poate fi determinat.
Filtru diferential.
Orez. 1.6 - Schema de notare derivată parțială:
1.4.2 Estimarea gradientului discret
Orez. 1.7 - Schema estimării derivate parțiale discrete:
1.4.3 Estimarea discretă a semnului de gradient
Cu un mic pas de eșantionare, înlocuim:
1.4.4 Metoda de detectare sincronă
Metoda de detectare sincronă implică adăugarea unui semnal sinusoidal suplimentar de amplitudine mică, frecvență înaltă la semnalul de intrare la un obiect extrem și extragerea componentei corespunzătoare din semnalul de ieșire. Din raportul de fază al acestor două semnale, se poate concluziona despre semnul derivatelor parțiale.
Orez. 1.8 - Diagrama funcțională a estimării derivate parțiale:
Orez. 1.9 - Ilustrație a trecerii oscilațiilor de căutare la ieșirea sistemului:
y 1 - punct de funcționare, în timp ce diferența de fază a semnalelor este egală cu 0.
y 2 - diferența de fază a semnalelor, ca cel mai simplu amplificator fază-frecvență, puteți utiliza blocul de multiplicare.
Orez. 1.10 - Ilustrația funcționării FCU:
Ca filtru, se alege un filtru de mediere pe o perioadă, care face posibilă obținerea la ieșire a unui semnal proporțional cu valoarea derivatei parțiale.
Orez. 1.11 - Linearizarea caracteristicii statice la punctul de operare:
Prin urmare, ecuația curbei extreme poate fi înlocuită cu ecuația dreptei:
Semnalul la ieșirea FPU:
k - coeficient de proporționalitate - tangenta unghiului de înclinare a dreptei.
Semnal de ieșire al filtrului:
Prin urmare:
Metoda de detectare sincronă este potrivită pentru determinarea nu numai a unei derivate parțiale, ci și a gradientului în ansamblu, în timp ce mai multe oscilații de frecvențe diferite sunt alimentate la intrare. Filtrele de ieșire corespunzătoare evidențiază răspunsul la un anumit semnal de căutare.
1.4.5 Filtrul de estimare a gradientului personalizat
Această metodă implică introducerea în sistem a unui sistem dinamic special, al cărui semnal intermediar este egal cu derivata parțială.
Orez. 1.12 - Schema unui filtru special pentru estimarea unei derivate parțiale:
constanta de timp a filtrului T:
Pentru a estima derivata totală a lui Y, se utilizează un DF - un filtru de diferențiere, iar apoi această estimare a derivatei totale este aplicată pentru a estima gradientul.
1.5 Organizarea mișcării până la extrem
1.5.1 Sisteme de prim ordin
Organizăm legea de control proporțional cu gradientul:
Să scriem ecuația sistemului cu buclă închisă:
Aceasta este o ecuație diferențială comună care poate fi investigată folosind metodele TAU.
Luați în considerare ecuația de statică a sistemului:
Dacă stabilitatea sistemului în buclă închisă este asigurată cu ajutorul câștigului k, atunci automat în statică vom ajunge la punctul extrem.
În unele cazuri, folosind coeficientul k, pe lângă stabilitate, este posibil să se asigure o anumită durată a procesului tranzitoriu într-un sistem închis, adică. furnizați timpul specificat pentru atingerea extremului.
Unde k este stabilitatea
Orez. 1.13 - Diagrama funcțională a unui sistem extremal de gradient de ordinul întâi:
Această metodă este potrivită numai pentru sistemele unimodale, de ex. sisteme cu un extremum global.
1.5.2 Metoda mingii grele
Prin analogie cu o minge care se rostogolește într-o râpă și depășește punctele extreme locale, un sistem AE cu procese oscilatorii depășește și extremele locale. Pentru a asigura procese oscilatorii, introducem inerție suplimentară în sistemul de ordinul întâi.
Orez. 1.14 - Ilustrație a metodei mingii „grele”:
Ecuația sistemului în buclă închisă;
Ecuația caracteristică a sistemului:
Cu cât d este mai mic, cu atât procesul tranzitoriu este mai lung.
Analizând caracteristica extremă, se stabilesc depășirea necesară și durata tranzitoriului, de unde:
1.5.3 Sisteme cu un singur canal de tip general
Legea de control:
Înlocuind legea de control în controlul obiectului, obținem ecuația sistemului în buclă închisă:
În cazul general, pentru a analiza stabilitatea unui sistem în buclă închisă, este necesar să se utilizeze a doua metodă Lyapunov, cu ajutorul căreia se determină câștigul controlerului. pentru că A doua metodă Lyapunov oferă doar o condiție suficientă pentru stabilitate, atunci funcția Lyapunov aleasă se poate dovedi a fi nereușită și o procedură obișnuită pentru calcularea controlerului nu poate fi propusă aici.
1.5.4 Sisteme cu cea mai mare derivată în control
Cazul general de extremum al obiectelor:
Funcțiile f, B și g trebuie să îndeplinească condițiile de existență și unicitate a soluției ecuației diferențiale. Funcția g - trebuie să fie diferențiabilă în mod multiplicabil.
С - matricea derivatelor
Problema de sinteză este rezolvabilă dacă matricea produsului nu este degenerată, adică
Analiza condiției de solubilitate pentru problema de sinteză permite determinarea derivatei variabilelor de ieșire, care depinde în mod explicit de acțiunea de control.
Dacă condiția (1.31) este îndeplinită, atunci prima derivată este o astfel de derivată și, prin urmare, cerințele pentru comportamentul sistemului cu buclă închisă pot fi formulate sub forma unei ecuații diferențiale pentru y de ordinul corespunzător.
Vom forma legea de control a sistemului în buclă închisă, pentru care vom forma legea de control, înlocuind-o în partea dreaptă a controlului cu:
Ecuația sistemului în buclă închisă în raport cu variabila de ieșire.
Luați în considerare o situație în care
Cu o alegere adecvată a câștigului, obținem ecuația dorită și ieșirea automată la extrem.
Parametrii regulatorului sunt selectați din aceleași considerații ca și pentru ACS convențional, adică. (SVK) i = (20 * 100), ceea ce permite furnizarea erorii corespunzătoare.
Orez. 1.15 - Schema unui sistem cu cea mai mare derivată în control:
În sistem, un filtru de diferențiere este introdus în sistem pentru a estima derivata de timp totală; prin urmare, este convenabil să se utilizeze un filtru de estimare a gradientului pentru a estima gradienții în astfel de sisteme. pentru că Ambele filtre au constante de timp mici, apoi pot apărea procese de timp diferit în sistem, care pot fi distinse folosind metoda de separare a mișcărilor, iar mișcările lente vor fi descrise prin ecuația (1.34), care corespunde valorii dorite la . Mișcările rapide trebuie analizate pentru stabilitate și, în funcție de raportul dintre constanta de timp a DF și filtrul pentru evaluarea derivatelor parțiale (FOCP), se pot distinge următoarele tipuri de mișcări:
1) Constantele de timp ale acestor filtre sunt comparabile.
Mișcările rapide descriu procesele combinate din aceste două filtre.
2) Constantele de timp diferă cu un ordin de mărime.
Pe lângă mișcările lente, sistemul observă mișcări rapide și super-rapide corespunzătoare celei mai mici constante de timp.
Ambele cazuri trebuie analizate pentru durabilitate.
2. Sisteme optime
Sistemele optime sunt sisteme în care o anumită calitate a muncii este atinsă prin utilizarea maximă a capabilităților unității, cu alte cuvinte, acestea sunt sisteme în care instalația funcționează la limita capacităților sale. Luați în considerare o legătură aperiodică de ordinul întâi.
Pentru care este necesar să se asigure timpul minim de tranziție y de la starea inițială y (0) la y k finală. Funcția de tranziție a unui astfel de sistem la K = 1 este următoarea
Orez. 2.1 - Funcția tranzitorie a sistemului la U = const:
Să luăm în considerare situația în care aplicăm acțiunea de control maximă posibilă la intrarea obiectului.
Orez. 2.2 - Funcția tranzitorie a sistemului la U = A = const:
t 1 - timpul minim posibil de tranziție y de la starea zero la cea finală pentru un obiect dat.
Pentru a obține o astfel de tranziție, există două legi de control:
A doua lege este mai de preferat și permite asigurarea controlului în caz de interferență.
Orez. 2.3 - Schema bloc a unui sistem cu o lege de control de tip feedback:
2.2 Enunțarea problemei sintezei sistemelor optime
2.2.1 Modelul matematic al obiectului
Obiectul este descris de variabile de stare
Unde funcția f (x, u) este continuă, diferențiabilă în raport cu toate argumentele și satisface condiția existenței și unicității soluției ecuației diferențiale.
Această funcție este neliniară, dar staționară. Ca cazuri speciale, obiectul poate fi sub forma unui sistem neliniar cu control aditiv:
Sau un sistem liniar
Obiectul trebuie prezentat sub una dintre cele trei forme prezentate mai sus.
2.2.2 Stări multiple de început și sfârșit
Problema tranziției optime de la starea inițială la starea finală este problema valorii la limită
Unde punctele de început și de sfârșit pot fi specificate într-una din cele patru moduri prezentate în Fig. 2.4.
a) o problemă cu capete fixe,
b) o problemă cu un prim capăt fix (un punct de plecare fix și un set de valori finale),
c) o problemă cu un capăt drept fix,
d) o problemă cu capetele în mișcare.
Figura 2.4 - Portrete de fază ale tranziției sistemului de la starea inițială la starea finală pentru diverse sarcini:
Pentru un obiect, setul de stări inițiale poate coincide în general cu întregul set de stări sau cu zona de lucru, iar setul de stări finale este un subspațiu al setului de stări sau al zonei de lucru.
Exemplul 2.1 - Un obiect descris printr-un sistem de ecuații poate fi transferat în orice punct din spațiul stărilor?
Substituind în a doua ecuație valoarea lui U din prima ecuație u = x 2 0 - 2x 1 0, obținem -5x 1 0 + x 2 0 = 0;
Obține un set de stări finale descrise de ecuația x 2 0 = 5x 1 0;
Astfel, setul de stări finale specificate pentru un obiect (sistem) trebuie să fie realizabil.
2.2.3 Constrângeri de stare și control
Orez. 2.5 - Vedere generală a zonei de lucru a spațiului de stat:
Este evidențiată zona de lucru a spațiului de stat, care este discutată. De obicei, această zonă este descrisă de limitele sale folosind convenții modulare.
Fig.2.6 - Vedere a spațiului de lucru al spațiului de stare, specificat prin convenții modulare:
De asemenea, este setat U - intervalul de valori permise ale acțiunii de control. În practică, regiunea U este de asemenea specificată folosind rapoarte modulare.
Problema sintezei unui controler optim este rezolvată sub condiția constrângerilor asupra controlului și a unei resurse limitate.
2.2.4 Criteriul de optimizare
În această etapă, sunt discutate cerințele pentru calitatea sistemului în buclă închisă. Cerințele sunt stabilite într-o formă generalizată, și anume sub forma unei funcționale integrale, care se numește criteriul de optimitate.
Vedere generală a criteriului de optimitate:
Tipuri particulare de criteriu de optimitate:
1) un criteriu de optimitate care asigură timpul minim al procesului tranzitoriu (se rezolvă problema performanței optime):
2) criteriul optimității, asigurând consumul minim de energie:
Pentru una dintre componente:
Pentru toate variabilele de stare:
O singură acțiune de control:
Pentru toate acțiunile de control:
Pentru toate componentele (în cazul cel mai general):
2.2.5 Formularul rezultat
Este necesar să se stipuleze sub ce formă vom căuta acțiunea de control.
Sunt posibile două variante de control optim: u 0 = u 0 (t), utilizat în absenţa perturbării, u 0 = u 0 (x), control optim sub formă de feedback (control în buclă închisă).
Formularea generală a problemei sintezei unui sistem optim:
Pentru un obiect descris de variabile de stare cu constrângeri date și un set de stări inițiale și finale, este necesară găsirea unei acțiuni de control care să asigure calitatea proceselor într-un sistem închis care să îndeplinească criteriul optimității.
2.3 Metoda de programare dinamică
1 Principiul optimității
Date inițiale:
Este necesar să vă găsiți 0:
Orez. 2.7 - Portret de fază al tranziției sistemului de la punctul inițial la punctul final în spațiul de stare:
Traiectoria tranziției de la punctul de început la punctul final va fi optimă și unică.
Formularea principiului: Secțiunea finală a traiectoriei optime este și traiectoria optimă. Dacă trecerea de la punctul intermediar la cel final nu ar fi efectuată de-a lungul traiectoriei optime, atunci ar fi posibil să se găsească traiectoria optimă pentru acesta. Dar în acest caz, trecerea de la punctul inițial la cel final ar trece pe o traiectorie diferită, care ar fi trebuit să fie optimă, iar acest lucru este imposibil, deoarece există o singură traiectorie optimă.
2.3.2 Ecuația Bellman de bază
Luați în considerare un obiect de control arbitrar:
Luați în considerare o tranziție de stare-spațiu:
Orez. 2.8 - Portret de fază al trecerii sistemului de la punctul inițial la punctul final x (t) - punctul curent (inițial), x (t + Дt) - punctul intermediar.
Să transformăm expresia:
Înlocuiți a doua integrală cu V (x (t + Дt)):
Pentru o valoare mică a lui Δt, introducem următoarele ipoteze:
2) Extindeți funcția auxiliară
Efectuând transformări ulterioare, obținem:
Unde min V (x (t)) este criteriul de optimitate J.
Ca rezultat, am obtinut:
Împărțiți ambele părți ale expresiei cu Dt și eliminați Dt la zero:
Obținem ecuația de bază Bellman:
2.2.3 Raporturi calculate ale metodei de programare dinamică:
Ecuația principală Belman conține (m + 1) - mărimi necunoscute, deoarece U 0 R m, VR 1:
Diferențiând de m ori, obținem un sistem de (m + 1) ecuații.
Pentru un cerc limitat de obiecte, soluția sistemului de ecuații rezultat oferă un control optim exact. O astfel de problemă se numește problema ACOR (proiectarea analitică a controlerelor optime).
Obiectele pentru care se ia în considerare problema ACOR trebuie să îndeplinească următoarele cerințe:
Criteriul de optimitate ar trebui să fie pătratic:
Exemplul 2.2
Pentru obiectul descris de ecuație:
Este necesar să se asigure trecerea de la x (0) la x (T) după criteriul de optimitate:
După ce am analizat obiectul pentru stabilitate, obținem:
U 0 = U 2 = -6x.
2.4 Principiul maxim al lui Pontryagin
Să introducem un vector de stare extinsă, pe care îl extindem datorită componentei zero, drept care alegem criteriul de optimitate. zR n + 1
Introducem si un vector extins al laturilor drepte, pe care il extindem datorita functiei sub integrala in criteriul de optimitate.
Introducem W - un vector de coordonate conjugate:
Să formăm Hamiltonianul, care este produsul scalar al lui W și q (z, u):
H (W, z, u) = W * q (z, u), (2,33)
Ecuația (2.34) se numește ecuația de bază a principiului maximului Pontryagin, bazată pe ecuația de programare dinamică. Controlul optim este cel care livrează maximul Hamiltonianului într-un interval de timp dat. Dacă resursa de control nu ar fi limitată, atunci condițiile extreme necesare și suficiente ar putea fi utilizate pentru a determina controlul optim. Într-o situație reală, pentru a găsi controlul optim, este necesar să se analizeze valoarea hamiltonianului la valoarea limită a nivelului. În acest caz, U 0 va fi o funcție a vectorului de stare extinsă și a vectorului de coordonate conjugate u 0 = u 0.
Pentru a găsi coordonatele conjugate, este necesar să rezolvăm sistemul de ecuații:
2.4.1 Procedura de calcul al sistemului conform principiului maxim Pontryagin.
Ecuațiile obiectului ar trebui reduse la forma standard pentru sinteza sistemelor optime:
De asemenea, este necesar să se stipuleze stările inițiale și finale și să se noteze criteriul optimității.
Se introduce un vector de stare extinsă
Vector extins al părților din dreapta:
Și un vector de coordonate conjugate:
Scriem Hamiltonianul ca produs punctual:
Aflați maximul hamiltonianului în raport cu u:
Prin care determinăm controlul optim u 0 (Ш, z).
Scriem ecuațiile diferențiale pentru vectorul de coordonate conjugate:
Găsiți coordonatele conjugate în funcție de timp:
6. Determinați legea optimă finală de control:
De regulă, această metodă permite obținerea unei legi de control programată.
Exemplul 2.3 - Pentru obiectul prezentat în Fig. 2.9.Este necesar să se asigure trecerea de la punctul inițial y (t) la punctul final y (t) în T = 1c cu calitatea procesului:
Orez. 2.9 - Model obiect:
Pentru a determina constantele b 1 și b 2, trebuie să rezolvați o problemă cu valori la limită.
Să scriem ecuația sistemului cu buclă închisă
Să integrăm:
Luați în considerare punctul final t = T = 1s., Ca x 1 (T) = 1 și x 2 (T) = 0:
1 = 1/6 b 1 + 1/2 b 2
A primit un sistem de ecuații, din care găsim b 2 = 6, b 1 = -12.
Să notăm legea de control u 0 = -12t + 6.
2.4.2 Problemă de control optim
Pentru un obiect de tip general este necesar să se asigure trecerea de la punctul inițial la punctul final în timp minim cu o lege de control limitată.
Caracteristicile problemei performanței optime
Hamiltonian de viteză:
Control releu:
Acesta este cazul obiectelor releu.
Teorema privind numărul de comutări ale acțiunii de control:
Această teoremă este valabilă pentru modelele liniare cu rădăcini reale ale ecuației caracteristice.
Det (pI - A) = 0 (2,51)
Л (A) este un vector de valori proprii reale.
Formularea teoremei:
În problema performanței optime cu rădăcini reale ale ecuației caracteristice, numărul de comutări nu poate fi mai mare decât (n-1), unde n este ordinea obiectului, prin urmare, numărul de intervale de constanță de control nu va fi mai mare decât (n-1).
Orez. 2.10 - Tipul acțiunii de control pentru n = 3:
Exemplul 2.4 - Luați în considerare un exemplu de rezolvare a problemei performanței optime:
W = [W 1, W 2]
H b = W 1 x 2 + W 2 (-2dx 2 -x 1 + u)
Pentru - rădăcini reale:
Suma celor doi exponenți este:
Dacă, atunci rădăcinile sunt conjugate complexe și soluția va fi o funcție periodică. Într-un sistem real, comutarile nu sunt mai mult de 5 - 6.
2.4.3 Metoda suprafeței de comutare
Această metodă ne permite să găsim controlul funcțiilor variabilei de stare pentru cazul în care controlul optim este de natură releu. Astfel, această metodă poate fi folosită pentru a rezolva probleme de performanță optimă, pentru un obiect cu control aditiv
Esența metodei este de a selecta puncte din întreg spațiul de stare în care semnul de control se schimbă și de a le combina într-o suprafață comună de comutare.
Suprafata de comutare
Legea controlului va fi după cum urmează:
Pentru a forma suprafața de comutare, este mai convenabil să se ia în considerare tranziția de la un punct de plecare arbitrar la originea coordonatelor
Dacă punctul final nu coincide cu originea, atunci este necesar să se selecteze noi variabile pentru care această condiție va fi adevărată.
Avem un obiect al formei
Considerăm tranziția, cu criteriul optimității:
Acest criteriu vă permite să găsiți o lege de control de următorul tip:
Cu necunoscut, condițiile inițiale ne sunt și ele necunoscute.
Luați în considerare tranziția:
Metoda timpului invers (metoda mișcării înapoi).
Această metodă vă permite să definiți suprafețele de comutare.
Esența metodei constă în faptul că punctele de început și de sfârșit sunt interschimbate, în timp ce în loc de două seturi de condiții inițiale, rămâne unul pentru.
Fiecare dintre aceste traiectorii va fi optimă. În primul rând, găsim punctele în care controlul își schimbă semnul și le combinăm într-o suprafață, apoi schimbăm direcția de mișcare la opus.
EXEMPLU Funcția de transfer a unui obiect este:
Criteriul optim de performanță:
Restricție la control.
Luați în considerare tranziția:
Controlul optim va avea un caracter releu:
Să mergem înapoi (adică). În timp invers, problema va arăta astfel
Luați în considerare două cazuri:
Obținem ecuațiile sistemului închis:
Folosim metoda integrării directe, obținem dependența de și din moment ce -, atunci avem
pentru că punctele de început și de sfârșit sunt schimbate, apoi obținem același lucru:
Să construim rezultatul și, folosind metoda planului de fază, să determinăm direcția
Aplicând metoda integrării directe, obținem:
Funcția va arăta astfel:
Schimbarea direcției:
Punct de schimbare a semnului (punct de comutare).
Expresie analitică generală:
Ecuația suprafeței:
Legea de control optim:
Înlocuind ecuația cu suprafața, obținem:
2.5 Sisteme suboptimale
Sistemele suboptimale sunt sisteme cu proprietăți aproape de optime
Se caracterizează prin criteriul optimității.
Eroare absolută.
Eroare relativă.
Un proces aproape de optim cu o precizie dată este numit suboptim.
Un sistem suboptimal este un sistem în care există cel puțin un proces suboptim.
Sistemele suboptime se obțin în următoarele cazuri:
la aproximarea suprafeței de comutare (folosind aproximarea liniară pe bucăți, aproximarea folosind spline)
Când, un proces optim va apărea într-un sistem suboptim.
limitarea spațiului de lucru al spațiului de stat;
3. SISTEME ADAPTIVE
3.1 Concepte de bază
Sistemele adaptive sunt astfel de sisteme în care parametrii controlerului se modifică în urma modificării parametrilor obiectului, astfel încât comportamentul sistemului în ansamblu să rămână neschimbat și să corespundă celui dorit:
Există două direcții în teoria sistemelor adaptive:
sisteme adaptive cu model de referință (ASEM);
sisteme adaptive cu un identificator (ASI).
3.2 Sisteme adaptive cu identificator
Identificator - un dispozitiv pentru evaluarea parametrilor unui obiect (evaluarea parametrilor ar trebui să fie efectuată în timp real).
AR - regulator adaptiv
ОУ - obiect de control
U - identificator
Partea care este evidențiată cu o linie punctată poate fi realizată digital:
V, U, X - pot fi vectori. Obiectul poate fi multicanal.
Să luăm în considerare cum funcționează sistemul.
În cazul parametrilor constanti ai obiectului, structura și parametrii controlerului adaptiv nu se modifică, feedback-ul principal acționează, sistemul este un sistem de stabilizare.
Dacă parametrii obiectului se modifică, atunci aceștia sunt estimați de către identificator în timp real, iar structura și parametrii controlerului adaptiv se modifică astfel încât comportamentul sistemului să rămână neschimbat. Principalele cerințe sunt impuse identificatorului (performanță etc.) și algoritmului de identificare în sine. Această clasă de sisteme este folosită pentru a controla obiecte cu nestaționări lente. Dacă avem un obiect general nestaționar:
;. Cea mai simplă vizualizare receptivă va fi următoarea:
Cerințe pentru sistem:
Unde și sunt matrice de coeficienți constanți.
În realitate, avem:
Dacă echivalăm, atunci obținem raportul pentru determinarea parametrilor controlerului
3.3 Sisteme adaptive cu model de referință
În astfel de sisteme, există un model de referință (EM), care este plasat paralel cu obiectul. BA - bloc de adaptare.
Fig 2 - Schema funcțională ASEM:
Luați în considerare funcționarea sistemului:
În cazul în care parametrii obiectului nu se modifică sau procesele de ieșire corespund referinței, eroarea este:
programarea controlului auto-tuning
Blocul de adaptare nu funcționează și regulatorul adaptiv nu este reconstruit, sistemul are un feedback fluid.
Dacă comportamentul este diferit de referință, acest lucru se întâmplă atunci când parametrii obiectului sunt modificați, caz în care apare o eroare.
Blocul de adaptare este pornit, structura regulatorului adaptiv este refăcută, astfel încât să o reducă la modelul de referință al obiectului.
Blocul de adaptare trebuie să reducă eroarea la zero ().
Algoritmul încorporat în blocul de adaptare este format în diferite moduri, de exemplu, folosind a doua metodă Lyapunov:
Dacă acest lucru este adevărat, atunci sistemul va fi asimptotic stabil și.
Postat pe Allbest.ru
...Documente similare
Enunțarea problemei de sinteză a sistemului de control. Aplicarea principiului maxim al lui Pontryagin. Metodă de proiectare analitică a controlerelor optime. Metoda de programare dinamică a lui Bellman. Programarea genetică și evoluția gramaticală.
teză, adăugată 17.09.2013
Metode de rezolvare a problemei sintetizării unui sistem de control pentru un obiect dinamic. Caracteristici comparative ale sintezei parametrice și structural-parametrice. O diagramă a procesului de regresie simbolică. Principiul metodei de programare analitică.
teză, adăugată 23.09.2013
Concept mare de sistem de control. Model de conjugare structurală a elementelor. Organizarea unei structuri de management pe mai multe niveluri. Problemă generală de programare liniară. Elemente de programare dinamică. Enunțarea problemei sintezei structurale.
tutorial, adăugat 24.06.2009
Enunțarea problemei de programare dinamică. Comportamentul dinamic al sistemului în funcție de starea inițială. Formularea matematică a problemei de control optim. Metoda de programare dinamică. Forma discretă a problemei variaționale.
rezumat, adăugat 29.09.2008
Studiul principalelor caracteristici dinamice ale întreprinderii pentru un canal de control dat, ale căror rezultate sunt suficiente pentru sinteza sistemului de control (CS). Construirea unui model matematic al obiectului de control. Analiza caracteristicilor frecvenței CS.
lucrare de termen, adăugată 14.07.2012
Teoria controlului automat. Funcția de transfer a sistemului conform diagramei sale structurale. Diagrama bloc și funcția de transfer a ACS continuu. Stabilitatea sistemului. Studiul procesului tranzitoriu. Calculul si construirea caracteristicilor de frecventa.
lucrare de termen, adăugată 14.03.2009
Concepte generale și clasificarea sistemelor locale de control. Modele matematice ale obiectului de control al LSU. Metode de liniarizare a ecuațiilor neliniare ale obiectelor de control. Procedura pentru sinteza LSU. Procese tranzitorii folosind funcții tranzitorii de impuls.
curs de prelegeri, adăugat 03.09.2012
Principiul de funcționare și sarcinile sistemelor informaționale pentru managementul proiectelor. Metode ale unui traseu critic, analiza și evaluarea planurilor. Model de rețea și grafic, tipuri de căi. Schimbul de informații între întreprinderi, clasificarea sistemelor informaționale și a piețelor lor de vânzare.
test, adaugat 18.11.2009
Clasificarea informațiilor după diverse criterii. Etapele dezvoltării sistemelor informaţionale. Tehnologia informației și sistemele de control. Nivelurile procesului de management. Metode de proiectare structurală. Metodologia Modelării Funcționale IDEF0.
lucrare de termen, adăugată 20.04.2011
Analiza principalelor etape de rezolvare a problemei de sinteză a controlerelor din clasa sistemelor liniare staţionare. Găsirea setărilor optime pentru controler și funcția de transfer a sistemului închis. Studiul compoziției și structurii sistemului de control automatizat.
Principalele tipuri cele mai comune de sisteme extreme, în care modul static de funcționare al unui obiect este optimizat, sunt sisteme extreme care asigură funcționarea unui obiect în punctul extrem al caracteristicilor sale statice.
Caracteristica statică ar trebui să reflecte relația dintre funcția de calitate a obiectului și parametrii de funcționare ai obiectului.
Este recomandabil să folosiți pistoale autopropulsate extreme:
1. Există un indicator de calitate (tehnic și economic, care caracterizează funcționarea unui obiect, iar această dependență are un extremum pronunțat) (cel mai adesea)
2. Beneficiază de o funcționalitate de calitate sporită.
3. Există posibilitatea definirii actuale a calității funcționale.
Dispozitivul de control în acest caz se numește optimizator sau regulator extrem.
Funcționalul de calitate pentru setarea modului de funcționare este scris:, unde este modificarea, care determină modul de funcționare al obiectului.
În funcție de faptul că caracteristica statică extremă este stabilă sau se modifică în timpul funcționării obiectului, sistemele extreme sunt împărțite în două grupe: - static; - dinamică.
Static: Aici este asigurat controlul extrem, corespunzând extremului caracteristicilor statice ale obiectului cu parametri constanți setați pentru un punct extremum dat, iar sistemul este similar cu un sistem convențional de stabilizare a regimului.
Dinamic: Aici caracteristica se poate schimba independent și punctul extremum de asemenea. În acest caz, sunt posibile două cazuri:
Se știe cum este deplasată caracteristica și se poate renunța la controlul programului;
Deplasarea caracteristicii celei mai extreme și a punctului extrem este de natură aleatorie (mai întâi trebuie să găsiți punctul optim, apoi să treceți la el).
În sistemele extreme, când caracteristica extremă este deplasată, poate exista o căutare automată a extremului și o schimbare la acesta.
În astfel de cazuri, se efectuează două operațiuni:
1. Motor de căutare de probă(determinarea raportului dintre indicele de calitate actual Q și Q extr și determinarea direcției de mișcare. Reduce la determinarea pantei caracteristicii:).
2. De lucru(elaborează valorile găsite pentru modificarea setării regulatorului pentru a asigura extremul funcției)
Puteți determina mărimea și semnul derivatei sau puteți utiliza o metodă specială în trepte pentru a găsi un extremum.
În funcție de utilizarea unui semnal suplimentar pentru a căuta un extremum, sistemele sunt împărțite:
Sisteme fără semnal suplimentar de căutare (în funcție de dacă panta S 0 este utilizată în formarea operațiilor de lucru sau semnul sistemului derivat este împărțit la proporţionalși releu(direcția mișcării este determinată de semnul dx slave / dt = h 0 SignS = h 0 Sign, adică implementarea „căutării independente” și RO trece de la o stare la alta și înapoi, ducând obiectul la extremul de caracterul static Aici dispozitivul logic comută atunci când semnul derivatei se schimbă - aceasta duce la o modificare a punctului de referință al regulatorului și la deplasarea corespunzătoare a regulatorului.Sunt utilizate pentru obiecte cu inerție mică.). Pentru sistemele inerțiale se folosește sistemul. tip de pas(aici, la comanda generatorului de comenzi prin pasul Dt, măsurând valoarea indicatorului de calitate și comparându-l cu Q specificat, ca urmare, semnalul de la intrare se inversează sau nu)
· Sistem cu add. Căutare. semnal (un semnal armonic și un semnal de la un dispozitiv logic sunt alimentate la intrare. Căutarea unui extremum se realizează pe baza studiului defazării semnalului X n la ieșirea sistemului. Căutarea semnalul în raport cu cel principal este semnalul modulator.
Bazat pe semnal. X se suprapune armonios. semnal de căutare și dacă semnal de pornire. X resp. poziționați la stânga punctului extremum (X 1), apoi în afară. suplimentar. link, un semnal de căutare suplimentar va crea o armonică. componenta Q * cu același f ca și semnalul de căutare și nu va exista nicio schimbare de fază. Principal semnal X 3 - armonic. declară în plus. link deplasat rel. Căutare. semnal într-un unghi –pi. Principal semnal X 2 - armonic. declară în plus. linkul va avea f de 2 ori mai mult decât originalul f. semnal. Acea. prin defazare m.o. defini. direcţie circulaţie.
Sisteme extreme multidimensionale. sunt construite pentru obiecte cu mai mulți parametri care au mai multe intrări și ieșiri, iar una dintre ieșiri are o caracteristică extremă, iar celorlalte ieșiri sunt impuse restricții.
Pentru a construi astfel de sisteme extreme. foloseste oferte speciale. metode de mat. programare și algoritmică. metode de optimizare.
Condiția pentru o funcție extremă a mai multor variabile este egalitatea la zero a tuturor părților sale. derivate în raport cu parametrii
Într-un caz particular, dacă este reprezentată funcția de calitate generalizată Q. extrem. static har-coy, atunci pentru design este multidimensional. sist. m / b a folosit metoda de planificare simplex, și în acest caz în sistem. secole dispozitiv pentru calcul. grindină. extrem. har-ki și un dispozitiv de formare. semnal de control.
Principiul construirii unui dispozitiv de calcul. grindină. în operaţiunea de găsire a unui extremum depinde de metoda de determinare. privat derivate și tipul de algoritm utilizat.
Cele mai utilizate metode sunt:
1.bineînțeles crește
2.derivată în timp
3.detecție sincronă
4.aplicarea unui model adaptiv
1. Metoda incrementului finit se bazează pe înlocuirea derivatelor parțiale cu un raport finit. incremente și definirea acestuia. În acest caz, cablul este schimbat alternativ. control și calcul. corespondenţă. se incrementează. yavl. componente ale gradientului funcției.
2. De asemenea, acțiunile de control sunt modificate pe rând și se calculează coeficientul. derivate și funcții de gradient.
Dezavantajele 1 și 2: necesitatea de a schimba alternativ controlul. influențe și calcul al gradientului pentru fiecare schimbare de exercițiu. semnal. Acest lucru necesită suplimentar. timp pentru calcul.
3. Coordonatele de control sunt modulate prin adăugare. armonios. semnale cu diferite. amplitudinile a ni si frecventele w ni. Număr de detectoare def. independent de număr coordonate care definesc extremul funcției Q xi. Sincronizare semnal de ieșire detector. proporțional cu privat derivat ... pentru că semnalele modulante sunt împărțite la frecvență. spectru, apoi alcătuit. gradient def. paralel. Cu utilizarea unui computer, acest timp va fi MIN.
XPM nu se limitează la dezvoltarea de software. Managementul extrem de proiect va fi eficient pentru echipele cu experiență care implementează proiecte inovatoare, startup-uri, lucrează în condiții haotice, imprevizibile.
Ce este Extreme Project Management?
Conceptul XPM a fost dezvoltat în 2004. Dar ar fi nedrept să-l considerăm singurul dezvoltator. Doug a fost inspirat de o serie de tehnici de la alți autori:
- model de management radical al proiectelor Rob Tomset,
- APM Jim Highsmith,
- conceptul de programare extremă Kenta Beck.
DeCarlo a investit în Extreme Project Management teoria haosuluiși sisteme adaptative complexe.
Teoria haosului este un domeniu matematic dedicat descrierii și studiului comportamentului sistemelor dinamice neliniare, care în anumite condiții sunt supuse așa-numitului haos dinamic.
Un sistem adaptativ complex este un sistem format din mai multe componente care interacționează care îndeplinește o serie de condiții (structură fractală, capacitatea de activitate adaptivă etc.). Exemplele de CAS includ un oraș, ecosisteme și bursa.
Doug compară managementul extrem de proiect cu jazz-ul.
Deși jazz-ul poate suna haotic, are o structură proprie, datorită căreia muzicienii au ocazia să improvizeze și să creeze adevărate capodopere.
În loc să meargă pe căile bătute, la Extreme Project Management, managerii de proiect discută cea mai bună alternativă cu clientul, experimentează, studiază rezultatele și folosesc aceste cunoștințe în următorul ciclu de proiect.
Una dintre proprietățile unor sisteme haotice,
care sunt obiectele de considerare ale teoriei haosului - „efectul fluture”,
popularizat după „And Thunder Came” al lui Ray Bradbury
Brian Wernham, autorul cărții „”, a subliniat cinci pași pe care trebuie să-i urmeze echipa de management de proiect extrem pentru a finaliza cu succes un proiect:
- Vedea- prezentați clar viziunea proiectului înainte de a începe managementul de proiect extrem
- A crea- implicarea echipei în procesul de gândire creativă și brainstorming pentru a crea și selecta idei pentru a realiza viziunea stabilită a proiectului
- Reîmprospăta- încurajează echipa să își testeze ideile prin implementarea de soluții inovatoare
- Supraestima- când se apropie de finalul ciclului de dezvoltare, echipa trebuie să-și reevalueze munca
- A distribui- după finalizarea instruirii, este importantă diseminarea cunoștințelor și aplicarea acestora în etapele viitoare ale proiectului, precum și la proiecte noi în general.
Deoarece oamenii sunt în fruntea managementului de proiect extrem, acest lucru determină, de asemenea, specificul măsurării succesului unui proiect XPM:
- utilizatorii sunt mulțumiți de progresul și livrările intermediare - există sentimentul că proiectul se mișcă în direcția corectă, în ciuda instabilității din jur.
- utilizatorii sunt mulțumiți de livrarea finală.
- membrii echipei sunt mulțumiți de calitatea vieții lor în timp ce lucrează la proiect. Dacă îi întrebi dacă ar dori să lucreze la un proiect similar, majoritatea spun că da.
Avantaje și dezavantaje ale XPM
Printre principalele avantaje ale metodologiei se numără următoarele:
- integritate- în ciuda faptului că Extreme Project Management include o varietate de metode, instrumente și șabloane, acestea au sens doar atunci când sunt aplicate întregului proiect în ansamblu. În calitate de manager de proiect, puteți vedea întregul proiect ca un singur sistem, fără a fi nevoie să analizați părțile sale individuale
- centrarea pe om- XPM se concentrează pe dinamica proiectului. Permite părților interesate să interacționeze și să comunice și, în cele din urmă, să răspundă nevoilor clientului.
- concentrare pe afaceri- Odată atins rezultatul, veți avea o viziune clară asupra modului în care proiectul poate beneficia clientul dumneavoastră. Echipa se concentrează în mod constant pe livrarea timpurie și frecventă a produselor
- umanism Este unul dintre principiile managementului de proiect extrem. Constă în luarea în considerare a calității vieții persoanelor implicate în proiect. Fiind parte integrantă a proiectului, pasiunea pentru muncă și spiritul corporativ afectează puternic afacerea, prin urmare, fizicul și moralul echipei sunt importante în timpul lucrului la proiect.
- realitatea ca bază- managementul extrem de proiect vă permite să lucrați într-un mediu imprevizibil, haotic. Nu poți schimba realitatea pentru a se potrivi cu proiectul. Se întâmplă invers: adaptezi proiectul la factori externi.
Nu fără dezavantajele sale. Acestea includ:
- incertitudine- această caracteristică întrerupe un mare sector de proiecte, începând cu cele cu un pericol critic (facilități militare, centrale nucleare, aplicații de internet banking etc.), terminând cu proiecte de licitație cu un buget, termeni și alte proprietăți strict convenite. proiect;
- cerințe ridicate pentru experiența și calificările echipei de proiect- este necesar să se adapteze constant la schimbările din mediul proiectului, să se stabilească o comunicare eficientă între ei, cu părțile interesate și cu managerul de proiect și să se lucreze în iterații scurte (aceasta din urmă este relevantă pentru sfera IT);
- nevoia de a schimba modul de gândire- spre deosebire de managementul de proiect tradițional, în care munca la un proiect decurge conform etapelor obișnuite, conform planului și rolurilor aprobate, echipa XPM trebuie să se refacă și să fie pregătită pentru imposibilitatea controlului complet asupra proiectului;
- imposibilitatea planificării pe termen lung- planul de relevanță de ieri nu va fi o știre proaspătă pentru ultima lună. Pentru ca echipa să lucreze corect pentru atingerea scopului proiectului, este necesar să arate calitățile de flexibilitate și autoorganizare.

- proiectul este în curs de creare într-un mediu dinamic- are loc o schimbare constantă a circumstanțelor, vitezei, cerințelor;
- posibilă aplicare încercare și eroareîn lucru la un proiect;
- o echipă cu experiență lucrează la proiect- spre deosebire de managementul de proiect traditional, oamenii sunt in frunte, nu procesele;
- dezvoltarea unei aplicații- în timpul ciclului de viață al dezvoltării, software-ul reușește în majoritatea cazurilor să-și schimbe funcționalitatea sau să extindă lista de platforme disponibile. Cu cât mai mulți utilizatori folosesc software-ul, cu atât se pot face mai multe modificări, pentru care managementul extrem de proiect este perfect.
- acesta este un meta proiect- adică care este împărțit în multe proiecte mici. XPM în acest caz va ajuta să faceți față întârzierii începerii lucrărilor;
- proprietarul afacerii este gata să participe la lucrul la proiect de la început până la sfârșit. Conexiunile trebuie făcute "Manager de proiect - om de afaceri",
« manager de proiect- părțile interesate”,
„director de proiect – proprietar de afaceri – părți interesate”.
Părțile interesate sunt persoane și organizații care influențează proiectul într-un fel sau altul. Acestea includ pe cei care sunt implicați activ în el (echipa de proiect, sponsor), și cei care vor folosi rezultatele proiectului (client), și persoanele care pot influența proiectul, deși nu participă la el (acționarii, companiile partenere). ).
Managementul extrem de proiect necesită adaptarea rapidă a echipei la condițiile neobișnuite, în continuă schimbare, în care trebuie să lucreze. Prin urmare, există mai multe reguli cheie care sunt necesare pentru utilizarea eficientă a Extreme Project Management:
Un exemplu de bază de diferență clasic management de proiect de la extrem... În primul, se atinge rezultatul planificat, în al doilea, cel dorit.
Managementul de proiect eXtreme:
Utilizarea leadershipului, principiilor și instrumentelor pentru a oferi valoare în fața volatilității Doug DeCarlo
# 1 pentru oricine caută să stăpânească Managementul Extrem de Proiect. Pe baza experienței cu peste 250 de echipe de proiect, autorul a scris un ghid cuprinzător pentru managementul de proiect extrem. Cartea este lăudată de managerii de proiect ai marilor organizații internaționale: Management Solutions Group, Inc., Zero Boundary Inc., Guru Unlimited etc.
Management eficient de proiect: tradițional, adaptiv, extrem,
Ediția a treia Robert K. Vysotsky
După ce ați citit, vă puteți face o idee nu numai despre managementul de proiect extrem, ci și despre adaptativ. Interesant – la finalul fiecărui capitol se pun întrebări pentru organizarea materialului depus, care este plin de cazuri reale de proiecte din diferite domenii.
Management radical de proiect Rob Thomsett
Managementul extrem de proiect este prezentat de la „A” la „Z”, fiecare instrument și tehnică, cu ajutorul cărora este implementat Extreme Project Management, este dezasamblat. Informații practice maxime cu studii de caz.
Practici de arhitectură: management de proiect extrem pentru arhitecți
Nu o carte, dar, dar este imposibil să nu o includă în colecție din cauza unicității sale. Aceasta este o resursă excelentă pentru utilizarea XPM în arhitectură și construcții. Din păcate, autorul site-ului nu îl mai actualizează, dar pagina este totuși bună ca cheat sheet.
Verdict
arta și știința de a facilita și gestiona fluxul de gânduri, emoții și acțiuni într-un mod care maximizează rezultatele în condiții dificile și volatile.
Motivele succesului XPM printre alte tehnici de management constau în trei dimensiuni:
- Managementul Extrem de Proiect face posibil acest lucru autocorecție și autoperfecționare continuă in timp real;
- XPM se concentrează pe definirea şi urmărirea misiunii proiectului insuflarea încrederii părților interesate și echipei de proiect;
- centrarea pe om, umanismul și prioritatea oamenilor față de procese ca caracteristici cheie ale metodologiei.