Voor het meten van krachten worden verschillende fysische effecten gebruikt, die worden gekenmerkt door een bepaalde relatie tussen de kracht en een andere grootheid, bijvoorbeeld vervorming (relatief of absoluut), druk, piëzo-elektriciteit, magnetostrictie, etc. De meest gebruikelijke methode voor het meten van kracht is het gebruik van elastische vervorming van veerelementen (bijvoorbeeld veerschalen). Binnen de grenzen van de wet van Hooke bestaat er een proportioneel verband tussen de kracht F en vervorming ε of D l: F~e~D l.
Spanning wordt meestal gemeten met behulp van de hierboven beschreven elektrische, optische of mechanische methoden.
Afhankelijk van de gekozen methode en het meetbereik wordt het vervormbare sensorelement (waarnemende vervorming) zo ontworpen dat de vervorming wordt gereproduceerd in de vorm van trek of compressie, d.w.z. als een verandering in de initiële lengte (basis). Het elastische element samen met de daaraan bevestigde elementen die transformatiefuncties uitvoeren (mechanisch, elektrisch, enz.), een beschermende behuizing, enz. vormt een krachtopnemer (dynamometer). Ondanks de verscheidenheid aan eisen met betrekking tot nominale belasting, kenmerken als gevolg van meettechnieken en andere redenen, kunnen alle elastische elementen worden teruggebracht tot een relatief klein aantal basistypen.
Mechanische rollenbanken voornamelijk gebruikt voor enkelvoudige metingen in bijzonder zware bedrijfsomstandigheden, maar ook waar een relatief lage nauwkeurigheid acceptabel is. Het gebruik van gevoelige meetinstrumenten (micrometer, microscoop) voor het meten van vervormingen maakt het gebruik van mechanische dynamometers echter mogelijk om een goede nauwkeurigheid te bereiken.
Bij andere rollenbanken wordt een verandering in de lengte van het elastische element omgezet in beweging langs de schaal van een lichtwijzer die wordt afgebogen door een roterende spiegel die aan het elastische element is bevestigd (Martens-apparaat). Met gekwalificeerde service en rekening houdend met de vele verplichtingen die aan de meettechniek verbonden zijn, kunnen zeer nauwkeurige resultaten worden bereikt. Vanwege een aantal problemen worden deze instrumenten vrijwel uitsluitend gebruikt voor testen en kalibratie.
Hydraulische rollenbanken Kan worden gebruikt voor metingen met gemiddelde nauwkeurigheid onder zware bedrijfsomstandigheden. Als aanwijsinstrument gebruiken zij drukmeters met een Bourdonbuis. Ze worden meestal rechtstreeks op de rollenbank gemonteerd; indien nodig kunnen ze via een capillaire buis van enkele meters lang op de rollenbank worden aangesloten. Dergelijke meetapparatuur maakt de aansluiting van opnameapparatuur mogelijk.
Elektrische rollenbanken. De snelle ontwikkeling van de elektrotechniek en elektronica heeft geleid tot het wijdverbreide gebruik van elektrische methoden voor het meten van mechanische grootheden, in het bijzonder kracht. Aanvankelijk werden mechanische spanningsopnemers in mechanische rollenbanken vervangen door elektrische (bijvoorbeeld mechanische verplaatsingsopnemers door inductieve). Met de ontwikkeling van rekstrookjes zijn er nieuwe mogelijkheden ontstaan. Desondanks werden echter andere elektrische meetmethoden verbeterd en werden nieuwe meetmethoden ontwikkeld.
Bij keuze De nauwkeurigheid van de meting is van groot belang.
1.2.1 Elektrische rekstrookjesdynamometers.
Onder de rollenbanken zijn rekstrookjesdynamometers van het grootste belang. Het meetbereik van deze rollenbanken is ongebruikelijk breed: er zijn rollenbanken met nominale krachten van 5 N tot meer dan 10 MN. hoge meetnauwkeurigheid. de fout is 0,03% en zelfs 0,01%.
Ontwerp, hoofdtypen. In zijn eenvoudigste vorm is het elastisch gevoelige element van een rollenbank een staaf die langs zijn as wordt belast. Dit soort detectie-elementen worden gebruikt voor metingen in het bereik van 10 kN tot 5 MN. Bij belasting trekt de staaf samen en neemt de diameter tegelijkertijd toe in overeenstemming met de Poisson-verhouding. Rekstrookjes die op de staaf zijn gelijmd in het gebied van een uniform krachtveld zijn opgenomen in het Wheatstone-brugcircuit, zodat er in de twee tegenovergestelde armen rekstrookjes zijn, waarvan de roosters langs de as van de staaf zijn gericht of loodrecht daarop staan.
Naast de rekstrookjes bevat het Wheatstone-brugcircuit extra circuitelementen die dienen om verschillende temperatuurafhankelijke effecten te compenseren, zoals nulinstabiliteit, veranderingen in de elastische modulus en thermische uitzetting van het materiaal van het sensorelement, veranderingen in de gevoeligheid van het rekstrookje en de linearisatie van de karakteristiek van de rollenbank.
De uitgangsspanning is evenredig met de relatieve vervorming, en deze is, in overeenstemming met de wet van Hooke, evenredig met de belasting op de staaf.
Om het meetbereik uit te breiden tot 1 - 20 MN voor een betere spanningsverdeling, wordt het elastische element vaak gemaakt in de vorm van een buis en worden rekstrookjes op de binnen- en buitenoppervlakken gelijmd.
Figuur 1 toont enkele soorten elastische elementen voor rekstrookjesdynamometers.
Om krachten in een kleiner bereik (tot ongeveer 5 N) te meten en de meetwaarde te vergroten, worden sensorelementen gebruikt die gebruik maken van buigvervormingen in plaats van longitudinale vervormingen.
Methoden voor het beheersen van sterktekwaliteiten hebben een lange geschiedenis. De eerste mechanische apparaten die ontworpen waren om de menselijke kracht te meten, werden in de 18e eeuw gemaakt.
Bij het monitoren van sterktekwaliteiten wordt doorgaans rekening gehouden met drie groepen indicatoren.
- 1. Basis: a) momentane krachtwaarden op elk moment van beweging (in het bijzonder maximale kracht); b) gemiddelde sterkte.
- 2. Integraal, zoals krachtimpuls.
- 3. Differentieel, bijvoorbeeld krachtgradiënt.
Maximale kracht zeer visueel, maar bij snelle bewegingen karakteriseert het hun eindresultaat relatief slecht (de correlatie tussen de maximale afstotingskracht en de hoogte van de sprong kan bijvoorbeeld bijna nul zijn). Volgens de wetten van de mechanica wordt het uiteindelijke effect van een kracht, in het bijzonder de kracht die wordt bereikt als resultaat van een verandering in de snelheid van een lichaam, bepaald door de impuls van de kracht. Als de kracht constant is, dan pols- is het product van kracht en de duur van zijn actie (Sj =F At). In andere omstandigheden, bijvoorbeeld tijdens impactinteracties, worden berekeningen van de krachtimpuls uitgevoerd door integratie, daarom wordt de indicator integraal genoemd.
De meest informatieve krachtimpuls is dus het controleren van slagbewegingen (bij boksen, het slaan van een bal, enz.).
Gemiddelde sterkte- dit is een voorwaardelijke indicator die gelijk is aan het quotiënt van het delen van de impuls van een kracht door de tijd van zijn actie. De introductie van een gemiddelde kracht komt overeen met de veronderstelling dat er gedurende dezelfde tijd een constante kracht (gelijk aan het gemiddelde) op het lichaam inwerkte.
Differentiële indicatoren worden verkregen als resultaat van het toepassen van de wiskundige bewerking van differentiatie. Ze laten zien hoe snel de momentane krachtgroottes veranderen.
Er zijn twee manieren om sterktekwaliteiten te registreren:
- 1) zonder meetapparatuur (in dit geval wordt de beoordeling van het niveau van krachtbereidheid uitgevoerd op basis van het maximale gewicht dat de atleet kan tillen of vasthouden);
- 2) met behulp van meetapparatuur - dynamometers of dynamografen.
Alle meetprocedures worden uitgevoerd met verplichte naleving van de metrologische vereisten die algemeen zijn voor het monitoren van de fysieke fitheid. Het is ook noodzakelijk om de specifieke vereisten voor het meten van sterktekwaliteiten strikt in acht te nemen:
- 1) bij herhaalde pogingen de positie van het lichaam (gewricht) waarin de meting wordt uitgevoerd bepalen en standaardiseren;
- 2) houd bij het meten van krachtmomenten rekening met de lengte van lichaamssegmenten;
- 3) houd rekening met de richting van de krachtvector.
Maximale kracht meten. Het concept van ‘maximale kracht’ wordt gebruikt om ten eerste de absolute kracht te karakteriseren, uitgeoefend zonder rekening te houden met de tijd, en ten tweede de kracht waarvan de duur wordt beperkt door de bewegingsomstandigheden. De verticale component van de maximale afzetkracht bij een beweging die een hardloopstap simuleert, is bijvoorbeeld 4000 N; de werkelijke verticale afzetkracht bij lopen is 700 N (ongeveer 10 N/kg van de massa van de atleet), bij hardlopen - 2000 N (of ongeveer 30 N/kg).
Maximale sterkte wordt gemeten in specifieke en niet-specifieke tests.
In het eerste geval worden krachtindicatoren vastgelegd in een competitieve oefening of een oefening die daar dichtbij ligt in de structuur van motorische kwaliteiten.
In het tweede geval wordt meestal een krachtmeetstandaard gebruikt, waarop bij standaardtaken (meestal in flexie en extensie van lichaamssegmenten) de kracht van vrijwel alle spiergroepen wordt gemeten.
Afhankelijk van de registratiemethode is het meetresultaat:
- 1) maximale statische kracht;
- 2) maximale dynamische kracht.
Bij het meten van kracht bij bewegingen met één gewricht wordt feitelijk het moment ervan geregistreerd, waarvan de waarde afhangt van de lengte van de krachtarm en de grootte van de uitgeoefende kracht (krachtmodulus). Daarom is de nauwkeurigheid van de meetresultaten groter naarmate het lichaam (of gewricht) van de atleet steviger en standaarder is gefixeerd tijdens de meting. Zelfs kleine veranderingen in de houding bij herhaalde pogingen kunnen een aanzienlijk verschil maken in de krachtprestaties. Omdat bij flexie- en extensiebewegingen niet de kracht wordt geregistreerd, maar het moment ervan, moeten de meetresultaten strikt genomen niet in newton (N) of kilogram kracht (kgf) worden weergegeven, maar in newtonometers (Nm). ) of kilogrammeter (kgm).
De sterkte-indicatoren die tijdens metingen worden geregistreerd, worden absoluut genoemd; Relatieve indicatoren (de verhouding tussen absolute kracht en lichaamsgewicht) worden bepaald door berekening. Bij het analyseren van relatieve indicatoren moet er rekening mee worden gehouden dat de “kracht-massa”-relatie in het algemeen wordt beschreven door de vergelijking:
Waar: F- sterkte (resultaat sterktetest); W- lichaamsgewicht; A - constante.
Het meten van krachtgradiënten. Differentiële krachtindicatoren (of gradiënten) karakteriseren het ontwikkelingsniveau van de explosieve kracht van atleten. Het bepalen van hun waarde houdt verband met het meten van de tijd die nodig is om de maximale kracht te bereiken of een aantal vaste waarden (0,5Fmax, enz.). Meestal wordt dit gedaan met behulp van tensodynamische apparaten, waarmee men de krachtdynamiek kan verkrijgen. Analyse van krachtgradiënten stelt ons in staat de redenen vast te stellen voor verschillen in competitieve bewegingen tussen atleten met hetzelfde niveau van absolute kracht.
via versnellingsmeter; het meten van de amplitude en frequentie van trillingen
2. Vergelijking van de onbekende kracht met de zwaartekracht P = mg: directe belading met standaardgewichten;
door hydraulische transmissie en standaardgewichten;
via hendels en standaardgewichten;
via hendels en slinger
3. Meten van elastische vervorming
lichaam dat in wisselwerking staat met een onbekende
door een bepaalde kracht F= c |; via spanningssensoren; via verplaatsingssensoren 4. Vergelijking van de onbekende kracht met de interactiekracht van de stroom met het magnetische veld F= / B ik sin a door middel van een elektrodynamische krachtopwekker. Het meten van variabele harmonische kracht door het bepalen van de amplitude en frequentie van trillingen van een lichaam met een bekende massa kan met hoge nauwkeurigheid worden uitgevoerd. Massa kan worden gemeten met een fout van niet meer dan een paar duizendsten van een procent. De oscillatiefrequentie kan met dezelfde nauwkeurigheid worden gemeten. De trillingsamplitude van een lichaam met een bekende massa kan worden gemeten met een fout van niet meer dan enkele tienden van een procent, wat in wezen de fout in het meten van kracht volgens de gespecificeerde methode zal bepalen.
Er wordt gebruik gemaakt van de methode om kracht te meten door een onbekende kracht te vergelijken met de zwaartekracht
worden gebruikt voor nauwkeurige metingen en reproductie van statische en quasi-statische krachten.
De directe laadmethode wordt gebruikt om de primaire staatsnormen voor de krachteenheid te creëren, en deze met de hoogste nauwkeurigheid te reproduceren.
De methode om een onbekende kracht te vergelijken met de zwaartekracht met behulp van hefbomen en standaardgewichten wordt gebruikt om tweederangs standaardmiddelen te creëren voor het meten van kracht, waardoor de meting ervan wordt gegarandeerd met een fout van niet meer dan 0,2% van de gemeten waarde, evenals van kracht meter van testmachines, die krachtmetingen uitvoeren met een fout van niet meer dan 1% van de gemeten kracht in het bereik van 0,04 - 1 vanaf de bovengrens van de krachtmeter.
De methode om een onbekende kracht te vergelijken met de zwaartekracht door middel van hydraulische overbrenging en standaardgewichten wordt ook gebruikt in tweederangs standaardmiddelen voor het meten van kracht en in krachtmeters van testmachines. Voor gebruik
Om wrijving in een hydraulische transmissie mogelijk te maken, wordt een zuiger-cilinderpaar gebruikt, waarbij het ene element ten opzichte van het andere roteert.
De methode om een onbekende kracht te vergelijken met de zwaartekracht met behulp van hefbomen en een slinger wordt gebruikt in krachtmeters van testmachines.
Alle krachtmeetinstrumenten die gebaseerd zijn op methoden voor het vergelijken van een onbekende kracht met de zwaartekracht, zijn meestal stationaire installaties. Het proces van het vergelijken van krachten in deze installaties is gemechaniseerd.
Krachtmeting door het meten van de elastische vervorming van een lichaam dat in wisselwerking staat met een onbekende kracht, is de meest gebruikelijke methode die wordt gebruikt in zowel stationaire als draagbare toepassingen om statische en tijdsvariërende krachten te meten. Deze methode wordt gebruikt in voorbeelddynamometers van de eerste categorie, die zorgen voor de overdracht van een krachteenheid van de staatsnorm naar voorbeeldmiddelen van de tweede categorie met een fout van niet meer dan 0,1% van de gemeten kracht. Bovendien wordt deze methode gebruikt in werkinstrumenten voor het meten van statische en tijdsvariërende krachten.
De methode maakt het mogelijk om stationaire en draagbare middelen te creëren voor het meten van trek- en drukkrachten: dynamometers, die een elastisch element bevatten dat is uitgerust met grepen of steunen om het in de krachtketen te kunnen opnemen. In het elastische element ontstaat een reactiekracht, die de gemeten kracht tegenwerkt. Het elastische element kan elektrisch inactief of elektrisch actief zijn, d.w.z. het is ook een gevoelig element.
Het elastische, elektrisch inactieve element vervult puur mechanische functies. De resulterende vervorming van het elastische element wordt waargenomen door een gevoelig element, dat een reksensor kan zijn
een verplaatsingssensor die deze omzet in een uitgangswaarde.
Een elastisch, elektrisch actief element reageert op een veld van mechanische spanning of vervorming gecreëerd door een gemeten kracht door de elektrische of magnetische eigenschappen ervan te veranderen. Tot elastische, elektrisch actieve elementen behoren bijvoorbeeld piëzo-elektrische en magneto-anisotrope elementen.
Om optimale metrologische prestaties van een rollenbank te bereiken, moeten verschillende principes worden gevolgd.
Het principe van structurele integriteit. De gemeten kracht moet in de rollenbank worden overgebracht via een continu medium van één materiaal. Schending van de continuïteit van de elastische elementstructuur veroorzaakt wrijving tussen de op elkaar aansluitende elementen. Deze wrijving introduceert krachtmeetfouten die aanzienlijk kunnen zijn.
Het principe van integratie. Hoe nauwkeuriger de rollenbank is, hoe beter het gevoelige element over de dwarsdoorsnede van het elastische element wordt verdeeld. Voor dit doel wordt middeling gebruikt: de integratie van spanning of vervorming van een elastisch element, dat kan worden gekarakteriseerd als denkbeeldig of reëel.
Bij denkbeeldige integratie wordt het gehele spannings- of rekveld, en dus de gemeten kracht, beoordeeld door de toestand op één punt van dit veld. In dit geval wordt aangenomen dat er binnen een beperkt gebied van het elastische element een bepaald mechanisch veld bestaat dat niet afhankelijk is van het punt waarop de kracht wordt uitgeoefend. Hierdoor is het mogelijk om één sensorelement te gebruiken. Ontwerpoplossingen die een denkbeeldige integratie garanderen, zijn het verwijderen van de krachtontvangende delen van het elastische element uit het gebied waar het gevoelige element zich bevindt, waardoor het gebied van mogelijke krachtuitoefeningspunten wordt beperkt.
Stuur uw goede werk naar de kennisbank is eenvoudig. Gebruik onderstaand formulier
Studenten, promovendi en jonge wetenschappers die de kennisbasis gebruiken in hun studie en werk zullen je zeer dankbaar zijn.
geplaatst op http://www.Allbest.ru/
Invoering
1. Algemene informatie over de gemeten waarde
2. Overzicht van meetmethoden
3. Beschrijving van de inductieve omzetter
3.1 Fouten van inductieve converters
3.2 Meetcircuits van inductieve transducers
4. Berekening van de belangrijkste parameters van de converter
5. Berekening van het brugcircuit
6. Bepaling van de fout van de inductieve omzetter
Conclusie
Bibliografie
Invoering
Meetopnemers zijn technische apparaten die hoeveelheden omzetten en een kanaal vormen voor het verzenden van meetinformatie. Bij het beschrijven van het werkingsprincipe van een meetapparaat dat een opeenvolgende reeks meetomvormers omvat, wordt dit vaak gepresenteerd in de vorm van een functioneel blokdiagram (meetcircuit), dat de functies van de afzonderlijke onderdelen weergeeft in de vorm van symbolische blokken met elkaar verbonden.
De belangrijkste kenmerken van de meetomvormer zijn de conversiefunctie, gevoeligheid en fout.
Meetomvormers kunnen worden onderverdeeld in drie klassen: proportioneel, functioneel en operationeel.
Proportionals zijn ontworpen om het ingangssignaal op een vergelijkbare manier weer te geven in een uitgangssignaal. De tweede zijn voor het berekenen van een functie van het ingangssignaal; nog andere - om een uitgangssignaal te verkrijgen dat een oplossing is voor een differentiaalvergelijking. Operationele omzetters zijn traag, omdat de waarde van hun uitgangssignaal op elk moment niet alleen afhangt van de waarde van het ingangssignaal op hetzelfde moment. Maar ook over de waarden op eerdere tijdstippen.
Bij het ontwerpen van een gespecialiseerd niet-standaard meetinstrument moet rekening worden gehouden met de essentiële organisatorische en technische vormen van controle, de productieschaal, de kenmerken van de te meten objecten, de vereiste meetnauwkeurigheid en andere technische en economische factoren.
In ons geval is alleen de converter ontworpen en daarom kunnen sommige van deze factoren worden verwaarloosd. Het gaat ons alleen om de vereiste nauwkeurigheid van het meten van een bepaalde parameter. Elke meettaak begint met de selectie van een primaire transducer - een "sensor" die initiële informatie (elk type vervorming, kinematische bewegingsparameter, temperatuurveranderingen, enz.) Kan omzetten in een signaal dat vervolgens wordt bestudeerd. De primaire transducer is de initiële schakel van het meetsysteem. De omzetter in dit cursuswerk is een inductieve omzetter.
1 . Komen vaak voorintelligentie-overmeetbaarmaat
Kracht is een fysieke vectorgrootheid, die een maatstaf is voor de intensiteit van de invloed van andere lichamen, evenals velden, op een bepaald lichaam. Een kracht die op een massief lichaam wordt uitgeoefend, veroorzaakt een verandering in de snelheid ervan of het optreden van vervormingen en spanningen daarin.
Kracht als vectorgrootheid wordt gekenmerkt door de grootte, richting en aangrijpingspunt van de kracht. Het concept van de werklijn van een kracht wordt ook gebruikt, wat een rechte lijn aangeeft die door het aangrijpingspunt van de kracht loopt en waarlangs de kracht wordt gericht.
De SI-eenheid van kracht is de Newton (N). Newton is een kracht die een versnelling van 1 m/s 2 verleent aan een massa van 1 kg in de werkingsrichting van deze kracht.
Bij technische metingen zijn de toegestane krachteenheden:
· 1 kgf (kilogramkracht) = 9,81 N;
· 1 tf (tonkracht) = 9,81 x 103 N.
Kracht wordt gemeten met behulp van rollenbanken, krachtmeetmachines en persen, maar ook door het laden met lasten en gewichten.
Dynamometers zijn apparaten die de elastische kracht meten.
Er zijn drie soorten rollenbanken:
· DP - veer,
· DG - hydraulisch,
· DE - elektrisch.
Volgens de methode voor het registreren van gemeten krachten zijn rollenbanken onderverdeeld in:
· richten - voornamelijk gebruikt voor het meten van statische krachten die ontstaan in constructies die op stands zijn geïnstalleerd wanneer er externe krachten op worden uitgeoefend, en voor het meten van de trekkracht tijdens een soepele beweging van een product;
· het tellen en schrijven van rollenbanken die variabele krachten registreren, worden meestal gebruikt om de trekkracht van stoomlocomotieven en tractoren te bepalen, omdat door sterke trillingen en onvermijdelijke schokken bij het versnellen van hun beweging, evenals door ongelijkmatige belasting van het product, variabele krachten ontstaan .
De meest voorkomende zijn veer- en richtdynamometers voor algemeen gebruik.
De belangrijkste parameters en afmetingen van veerdynamometers voor algemeen gebruik met een schaalafleesapparaat, bedoeld voor het meten van statische trekkrachten, zijn vastgelegd in GOST 13837.
De meetlimieten en fout van de rollenbank moeten op twee manieren worden bepaald:
· berekend
· volgens OST 1 00380-tabellen.
Werkende meetinstrumenten die worden gebruikt in krachtmeetsystemen worden gegeven in OST 1 00380.
Er zijn verschillende soorten krachten: zwaartekracht, elektromagnetisch, reactief, nucleair, zwakke interactie, traagheidskracht, wrijvingskracht en andere. Krachten moeten binnen een breed bereik worden gemeten - van 10 -12 N (Van der Waals-krachten) tot 10 N (impact, trekkrachten). Kleine krachten komen aan bod in wetenschappelijk onderzoek, bij het testen van precisiekrachtsensoren in besturingssystemen, enz. Krachten van 1N tot 1MN zijn typisch voor het testen van apparatuur en bij het bepalen van krachten in voertuigen, rollende machines, enz. Op sommige gebieden van de machinebouw, het walsen van staal en de lucht- en ruimtevaarttechniek is het noodzakelijk krachten tot 50-100 MN te meten. De fouten bij het meten van krachten en momenten tijdens technische metingen bedragen 1-2%. Het meten van kracht komt neer op het meten van fysieke grootheden als druk, versnelling en massa, waarvan de meetfout in veel gevallen niet groter mag zijn dan 0,001%.
2 . Beoordelingmethodenmeetbaarhoeveelheden
In de moderne technologie worden metingen van niet-elektrische grootheden (temperatuur, druk, kracht, enz.) door middel van elektrische methoden op grote schaal gebruikt. In de meeste gevallen komen dergelijke metingen neer op het feit dat een niet-elektrische grootheid wordt omgezet in een elektrische grootheid die daarvan afhankelijk is (bijvoorbeeld weerstand, stroom, spanning, inductie, capaciteit, enz.), door te meten wat mogelijk is. om de gewenste niet-elektrische grootheid te bepalen.
Een apparaat dat een niet-elektrische grootheid omzet in een elektrische grootheid, wordt een sensor genoemd. Sensoren zijn onderverdeeld in twee hoofdgroepen: parametrisch en generator. Bij parametrische sensoren veroorzaakt een niet-elektrische grootheid een verandering in elke elektrische of magnetische parameter: weerstand, inductie, capaciteit, magnetische permeabiliteit, enz. Afhankelijk van het werkingsprincipe zijn deze sensoren onderverdeeld in weerstand, inductief, capacitief, enz.
Apparaten voor het meten van verschillende niet-elektrische grootheden met elektrische methoden worden veel gebruikt in eps. en diesellocomotieven. Dergelijke apparaten bestaan uit sensoren, een soort elektrisch meetapparaat (galvanometer, millivoltmeter, milliampèremeter, ratiometer, enz.) en een tussenverbinding, die een elektrische brug, versterker, gelijkrichter, stabilisator, enz. kan omvatten.
Veranderende kracht door balanceringsmethode
De methode is gebaseerd op het balanceren van de gemeten kracht met de kracht gecreëerd door de inverse elektromechanische omzetter, meestal magneto-elektrisch, evenals de reactiekracht die ontstaat in het dynamische systeem. Dergelijke krachten omvatten middelpuntzoekende kracht, traagheidskracht tijdens oscillerende beweging en gyroscopisch moment.
Een veelbelovende manier om uiterst nauwkeurige instrumenten te maken voor het meten van grote krachten (vanaf 105 N en meer) is het gebruik van elektrodynamische inverse krachtomzetters met supergeleidende wikkelingen, die het mogelijk maken krachten tot 107-108 N te reproduceren met een fout van 0,02 -0,05%.
De gyroscopische methode voor het meten van krachten is gebaseerd op het meten van de precessiehoeksnelheid van het gyroscoopframe, die plaatsvindt onder invloed van een gyroscopisch moment dat het gemeten moment in evenwicht brengt of het moment dat door de gemeten kracht wordt gecreëerd. Deze methode heeft toepassing gevonden in de weegtechnologie.
De reactiekracht wordt op unieke wijze bepaald door de geometrie van het systeem, de massa van de wiggen en de frequentie van hun rotatie. Bij constante parameters van het meetapparaat wordt de gemeten kracht Fx dus bepaald door het motortoerental.
Forceer methode
Het is gebaseerd op de afhankelijkheid van de kracht of het krachtmoment ontwikkeld door een inelastisch of elastisch sensorelement van de uitgeoefende druk. Met deze methode worden twee soorten instrumenten en druksensoren gebouwd:
Krachtsensoren met directe conversie, waarbij de door het sensorelement ontwikkelde kracht met behulp van een elektrische omzetter wordt omgezet in een elektrische grootheid
Apparaten en sensoren met krachtcompensatie, waarbij de door het sensorelement ontwikkelde kracht wordt gecompenseerd door de kracht die door het compensatie-element wordt gecreëerd. Afhankelijk van het type compensatieapparaat kan het uitgangssignaal stroom-, lineair of hoekverplaatsing zijn.
Meting van kracht, mechanische spanning
Krachtsensoren kunnen in twee klassen worden verdeeld: kwantitatief en kwalitatief.
Kwantitatieve sensoren meten kracht en vertegenwoordigen de waarde ervan in elektrische eenheden. Voorbeelden van dergelijke sensoren zijn loadcellen en rekstrookjes.
Kwaliteitssensoren zijn drempelapparaten waarvan de functie niet is om de waarde van een kracht te kwantificeren, maar om te detecteren dat een bepaald niveau van uitgeoefende kracht is overschreden. Dat wil zeggen, in het eerste geval hebben we het over meten, en in het tweede geval over het beheersen van kracht of mechanische spanning. Voorbeelden van dergelijke apparaten zijn bijvoorbeeld rekstrookjes en computertoetsenborden. Om de beweging en positie van objecten te detecteren, worden vaak hoogwaardige sensoren gebruikt.
Methoden voor het meten van kracht kunnen in de volgende groepen worden verdeeld:
* een onbekende kracht in evenwicht brengen met de zwaartekracht van een lichaam met een bekende massa;
* meting van de versnelling van een lichaam met een bekende massa waarop een kracht wordt uitgeoefend;
* een onbekende kracht in evenwicht brengen met een elektromagnetische kracht;
* kracht omzetten in vloeistofdruk en deze druk meten;
* meting van de vervorming van een elastisch element van een systeem veroorzaakt door een onbekende kracht.
De meeste sensoren zetten kracht niet direct om in een elektrisch signaal. Meestal zijn hiervoor meerdere tussenstappen nodig. Daarom zijn krachtsensoren in de regel samengestelde apparaten. Een krachtsensor is bijvoorbeeld vaak een combinatie van een kracht-naar-verplaatsingstransducer en een positie- (verplaatsings)detector. De principes van het construeren van schalen komen neer op het meten van kracht. De uitgeoefende kracht werkt op een primaire transducer (sensor), bestaande uit een elastisch element en een rektransducer, mechanisch verbonden met het elastische element, en zet deze vervorming om in een elektrisch signaal.
Momenteel worden in de weegtechniek de volgende typen converters gebruikt:
1. Reostatische omzetters. Hun werking is gebaseerd op het veranderen van de weerstand van de reostaat, waarvan de motor beweegt onder invloed van kracht.
2. Draad-draad-transducers (rekweerstand). Hun werk is gebaseerd op de verandering in weerstand van de draad terwijl deze vervormt.
4. Inductieve omzetters. Een verandering in de inductantie van een transducer als gevolg van een verandering in de positie van een van zijn onderdelen onder invloed van de gemeten grootheid. gebruikt om kracht, druk en lineaire beweging van een onderdeel te meten.
5. Capacitieve converters. Verandering in de capaciteit van de omzetter onder invloed van de gemeten niet-elektrische grootheid: kracht, druk van lineaire of hoekbeweging, vochtgehalte, enz.
Generatoromzetters zijn onderverdeeld in groepen op basis van hun werkingsprincipe:
1. Inductieomvormers. Hun werking is gebaseerd op de omzetting van een gemeten niet-elektrische grootheid, zoals snelheid, lineaire of hoekbewegingen, in een geïnduceerde emf.
3. Piëzo-elektrische transducers. Piëzo-elektrisch effect, d.w.z. optreden van emf in sommige kristallen onder invloed van mechanische krachten wordt het gebruikt om deze krachten, druk en andere grootheden te meten.
3 . Beschrijvinginductiefomvormer
Bij technische en wetenschappelijke metingen van niet-elektrische grootheden worden op grote schaal inductieve transducers gebruikt die tot de groep van parametrische sensoren behoren. Ze onderscheiden zich door hun eenvoud van ontwerp, betrouwbaarheid en lage kosten. Bovendien hebben ze geen complexe secundaire apparatuur nodig om te kunnen werken.
Een inductieve omzetter is een smoorspoel waarvan de inductie verandert onder invloed van de ingevoerde (gemeten) grootheid. In de meettechnologie worden transducerontwerpen met variabele luchtspleet en solenoïde (of plunjer) transducers gebruikt, die in dit werk worden bestudeerd.
Een inductieve omzetter met een variabele luchtspleet wordt schematisch weergegeven in Fig. 1. Het bestaat uit een U-vormig magnetisch circuit 1, waarop een spoel 2 is geplaatst, en een beweegbaar anker 3. Wanneer het anker beweegt, verandert de lengte van de luchtspleet en bijgevolg de magnetische weerstand. Dit veroorzaakt een verandering in de magnetische weerstand en inductantie van de omzetter L. Onder bepaalde aannames kan de inductantie van de omzetter worden berekend met behulp van formule (1):
Rijst. 1. Ontwerp van een inductieve omzetter met een variabele luchtspleet (1-U-vormige magnetische kern, 2-spoelen, 3-ankers): a) enkele omzetter; b) differentieelomvormer
waarbij w het aantal windingen van de spoel is, µ o = 4 10 7 H/m is de magnetische constante, µ is de magnetische constante van staal, is het dwarsdoorsnedeoppervlak van de magnetische flux in de luchtspleet, is de gemiddelde lengte van de magnetische veldlijn langs het staal.
Enkelvoudige inductieve omzetters hebben een aantal nadelen, met name hun conversiefunctie is niet-lineair, ze kunnen een grote additieve fout hebben die wordt veroorzaakt door een temperatuurverandering in de actieve weerstand van de wikkeling, en een aantal andere.
Differentiële converters, dit zijn twee enkele converters met een gemeenschappelijk anker, hebben deze nadelen niet. In afb. Figuur 1b toont een differentiële inductieve omzetter bestaande uit twee omzetters getoond in figuur 1. 1a.
Wanneer het anker bijvoorbeeld naar links beweegt, neemt de inductantie L toe en neemt de andere inductantie L2 af.
Rijst. 2. Ontwerp van een inductieve plunjeromzetter (1 - spoel, 2 - plunjer): a) enkele convertor; b) differentieelomvormer
Een ander type inductieve omzetters zijn plunjerconverters. In afb. Figuur 2a toont een transducer met enkele plunjer, dat wil zeggen een spoel 1 waaruit een ferrimagnetische kern 2 (plunjer) kan worden uitgestoken. Wanneer de plunjer in de middelste stand staat, is de inductantie maximaal.
Een differentiële omzetter, bestaande uit twee omzetters van het enkele plunjertype, wordt schematisch weergegeven in figuur 2. 2b. Ook hier geldt dat wanneer de plunjer beweegt, de ene inductantie afneemt en de andere toeneemt.
Bij gebruik van inductieve omzetters is de uitgangsgrootheid meestal niet de inductie als zodanig, maar de reactantie van de omzetter Z, die, als de actieve component wordt verwaarloosd, gelijk is aan Z = jwL.
3.1 Fouteninductiefconverters
Fouten in inductieve omzetters zijn voornamelijk te wijten aan veranderingen in de actieve component van hun weerstanden. Deze fout is additief en neemt af wanneer brugcircuits worden gebruikt. Wanneer de temperatuur verandert, verandert bovendien de magnetische permeabiliteit van staal, wat leidt tot een extra verandering in de additieve en vermenigvuldigingsfouten. Veranderingen in de voedingsspanning en -frequentie veroorzaken ook veranderingen in de gevoeligheid en het optreden van vermenigvuldigingsfouten.
Onder de fouten van inductieve sensoren zijn de volgende:
1.1) Fout als gevolg van temperatuuromstandigheden. Deze fout is willekeurig en moet worden beoordeeld voordat de sensor begint te werken. De fout treedt op vanwege het feit dat bepaalde parameters van de sensorcomponenten afhankelijk zijn van de temperatuur en met een vrij sterke afwijking van de norm in de ene of de andere richting, kan de fout behoorlijk indrukwekkend zijn.
1.2) Fout als gevolg van de aantrekkingskracht van het anker
1.3) Lineariteitsfout van de transformatiefunctie
Wanneer inductieve omzetters in brugcircuits werken, treedt er een fout op als gevolg van instabiliteit van de voedingsspanning en frequentie van de brug, evenals een verandering in de vorm van de voedingsspanningscurve. Om de eigenschappen van inductieve MT's te verbeteren, worden differentiële converters gebruikt (hun ontwerp wordt getoond in figuur 1b). Differentiële converters kunnen fouten aanzienlijk verminderen, de gevoeligheid vergroten en het lineaire deel van de karakteristiek vergroten.
3.2 Metenkettingeninductiefconverters
Bruggen voor het meten van de inductie en kwaliteitsfactor van inductoren. De inductor, waarvan de parameters worden gemeten, is verbonden met een van de armen van een vierarmige brug, bijvoorbeeld met de eerste arm:
Om de brug in evenwicht te brengen, moet ten minste één van de overige armen reactantie bevatten in de vorm van inductie of capaciteit.
De voorkeur gaat uit naar containers, omdat... Inductoren zijn qua productieprecisie inferieur aan condensatoren, en zijn veel duurder. Het diagram van een dergelijke brug wordt getoond in Fig. 3
Rijst. 3. Brug voor het meten van de parameters van inductoren
Wanneer de brug in evenwicht is, is dit volgens de algemene evenwichtsvergelijking waar. Door de reële en imaginaire delen afzonderlijk gelijk te stellen, verkrijgen we twee evenwichtsvoorwaarden:
Zo'n brug wordt gebalanceerd door het afstellen van en. De waarde is evenredig met de inductantie en - de kwaliteitsfactor van de gemeten spoel. Het nadeel van het beschouwde circuit is de slechte convergentie van de brug bij het meten van de parameters van spoelen met een lage kwaliteitsfactor. Als Q = 1 is het balanceringsproces al moeilijk, en als Q< 0,5 уравновешивание моста практически невозможно.
meetkracht inductieve transducer
4 . Berekeningvoornaamstparametersomvormer
Er moet een sensor worden ontwikkeld waarvoor de volgende kenmerken van het meetinstrument worden gegeven:
Gemeten hoeveelheid: kracht;
De waarde van de gemeten parameter: 70-120 kN;
Meetfout: 0,25%
Type uitgangssignaal: elektrisch signaal
Omvormer: inductief
Voor ons cursuswerk kiezen we een enkele inductieve omzetter met een variabele luchtspleet, omdat deze wordt gekenmerkt door metingen van 0,01 tot 10 mm, waardoor we een bepaalde parameter kunnen meten.
Laten we het blokschema van dit apparaat weergeven in figuur 4. Het uitgangssignaal wordt verkregen in de vorm van een wisselspanning, ontleend aan de belastingsweerstand R N die is aangesloten op het circuit van wikkeling 2 geplaatst op kern 1. De stroom wordt geleverd door wisselstroom spanning U. Onder invloed van het ingangssignaal beweegt anker 3 en verandert de opening:
Rijst. 4 - Enkelvoudige inductieve omvormer met variabele luchtspleet
Laten we de belangrijkste parameters berekenen van het frame van de sensor die wordt ontwikkeld:
Materiaal - precisielegering 55 VTYu;
Poisson-ratio - 0,295;
Elasticiteitsmodulus - 11 * N/ = 1,1209 * kgf/;
Laat de straal van het membraan;
24,77 MPa = 2,43 kgf;
42,46 MPa = 4,17 kgf.
Laten we de dikte van het membraan berekenen met behulp van formule (2)
h = 0,0408cm;
Met behulp van formule (3) bepalen we de minimale en maximale doorbuiging van het membraan
P = 0,044 centimeter;
P = 0,076cm;
Met behulp van formule (4) berekenen we de inductie bij de maximale doorbuiging van het membraan.
Dwarsdoorsnede van de luchtspleet;
Magnetische permeabiliteit van lucht;
Variabel luchtspleetoppervlak.
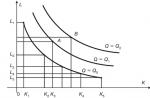
We presenteren de verkregen gegevens in Tabel 1 en geven in de grafiek de afhankelijkheid (P) (Figuur 5) en de afhankelijkheid L(P) (Figuur 6) weer:
tafel 1
Berekening van inductieve omzetter
Rijst. 5 - Afhankelijkheid (P)
Rijst. 6 - Afhankelijkheid L(P)
5 . Berekeningstoepschema
De Maxwell-Vina-brug wordt weergegeven in figuur (3)
Laten we nemen = 800 Ohm;
Laten we berekenen op de minimale en maximale inductantiewaarden.
6 . Definitiefouteninductiefomvormer
De informatiecapaciteit van een inductieve sensor wordt grotendeels bepaald door de fout die hij maakt bij het omzetten van de gemeten parameter. De totale fout van een inductieve sensor bestaat uit een groot aantal componentfouten, zoals een fout door de niet-lineariteit van de karakteristiek, een temperatuurfout, een fout door de invloed van externe elektromagnetische velden, een fout door het magneto-elastische effect, een fout van de verbindingskabel en andere.
Volgens referentiegegevens bedraagt de fout van de ampèremeter 0,1% en de brugfout 0,02%.
0,25 - (0,02 + 0,1) = 0,13%;
De fout van de inductieve sensor wordt bepaald door formule (1):
Laten we de benodigde variabelen vinden.
0,065*24,77=1,61 MPa;
169,982 mH.
We vervangen de verkregen gegevens in uitdrukking (6) en vinden de fout van de inductieve sensor:
Laten we de resulterende fout vergelijken met de gegeven fout
0,23% < 0,25%
De resulterende fout is dus niet meer dan de gespecificeerde fout, dus we concluderen dat het ontwikkelde systeem aan de gestelde eisen voldoet.
Conclusie
Het cursuswerk was gewijd aan de ontwikkeling van een methode voor het meten van kracht met behulp van een inductieve transducer die voldoet aan de eisen van de technische specificaties. Tijdens het ontwerp werden verschillende methoden voor het meten van kracht bestudeerd, op basis waarvan de resulterende methode voor het meten van deze parameter werd ontwikkeld.
Er werd een overzicht van de krachtmeetmethoden uitgevoerd, de juiste methode werd geselecteerd in het meetbereik, de belangrijkste parameters van de transducer werden berekend en de fout van de resulterende krachtmeetmethode werd berekend.
Dus tijdens het voltooien van het cursuswerk werden alle punten van de technische specificaties voltooid en werd een methode voor het meten van de overeenkomstige parameter ontwikkeld die aan de vereisten daarvoor voldoet.
Lijstliteratuur
1. Meizda F. Elektronische meetinstrumenten en meetmethoden: Vert. van Engels M.: Mir, 1990. - 535 p.
2. Brindley KD Meetomvormers. M.: Elektr, 1991. - 353 p.
3. Spektor S.A. Elektrische metingen van fysieke grootheden: Meetmethoden: Leerboek voor universiteiten. L.: Energoatomizdat, 1987. - 320 p.
4. Levshina ES Elektrische metingen van fysieke grootheden. M.: Mir, 1983 - 105 p.
Geplaatst op Allbest.ru
...Soortgelijke documenten
Ontwikkeling van een meetkanaal voor het bewaken van de fysieke parameter van een procesinstallatie: selectie van technische meetinstrumenten, berekening van de fout van het meetkanaal, smoorinrichting, flowmetermembranen en automatische potentiometer.
cursuswerk, toegevoegd op 03/07/2010
Brug- en indirecte methoden voor het meten van DC-weerstand. Resonantie-, brug- en indirecte methoden voor het meten van inductorparameters. Oplossing van het probleem van het meten van condensatorparameters met behulp van een homogene brug.
test, toegevoegd op 10/04/2013
Kenmerken van het meten van stroom in een circuit met behulp van een ampèremeter. Een methode voor het berekenen van de stroomsterkte in een onvertakt deel van een elektrisch circuit volgens de eerste wet van Kirchhoff, waarbij de juistheid ervan wordt gecontroleerd. Analyse van absolute en relatieve fouten van circuitparameters.
laboratoriumwerk, toegevoegd 01/12/2010
Basistypen, ontwerp, werkingsprincipe van sensoren die worden gebruikt om druk te meten. Hun voor- en nadelen. Ontwikkeling van een piëzo-elektrische transducer. Elementen van het structurele diagram. Berekening van conversiefuncties en apparaatgevoeligheid.
cursuswerk, toegevoegd op 16-12-2012
Selectie van een meetapparaat voor tolerantiecontrole van parameters. Bepaling van de betrouwbaarheidsgrenzen van de niet-uitgesloten betrouwbaarheidsfout van het meetresultaat. Doel en werkingsprincipe van digitale universele voltmeters en hun componenten.
cursuswerk, toegevoegd op 14-04-2019
Apparaten voor het meten van lichtniveaus. Ontwikkeling van meettechnieken. Bepaling van de verlichting met behulp van een seleniumfotocel. Verlichting meten met een Yu117 luxmeter. Bepaling van de meetfout. Omvang en werking van het apparaat.
cursuswerk, toegevoegd 05/05/2013
Classificatie van meetinstrumenten en bepaling van hun fouten. Overweging van de wetten van Newton. Kenmerken van fundamentele interacties, zwaartekracht en equiactie. Beschrijving van de doeleinden van gravimeters, dynamometers en een apparaat voor het meten van compressiekracht.
cursuswerk, toegevoegd op 28/03/2010
Directe en indirecte metingen van spanning en stroom. Toepassing van de wet van Ohm. Afhankelijkheid van de resultaten van directe en indirecte metingen van de waarde van de rotatiehoek van de regelaar. Bepaling van de absolute fout van de indirecte meting van gelijkstroom.
laboratoriumwerk, toegevoegd op 25-01-2015
Magneto-elektrische meetmechanismen. Een methode voor het indirect meten van actieve weerstand tot 1 Ohm en het beoordelen van de systematische, willekeurige, component- en totale meetfout. Middelen voor het meten van niet-elektrische fysieke grootheden (druk).
cursuswerk, toegevoegd op 29-01-2013
Parameters en kenmerken van rekstrookjes, rekconversie. Berekening van functie en transmissiecoëfficiënt rekening houdend met de invloed van eind- en contactsecties. Bepalen van de parameters van de meetmodule. Transport, installatie en opslag van het apparaat.
We weten al dat om de interactie tussen lichamen te beschrijven, een fysieke grootheid wordt gebruikt die kracht wordt genoemd. In deze les zullen we meer leren over de eigenschappen van deze grootheid, de krachteenheden en het apparaat dat wordt gebruikt om deze te meten: een rollenbank.
Onderwerp: Interactie van lichamen
Les: Eenheden van kracht. Dynamometer
Laten we allereerst onthouden wat kracht is. Wanneer een ander lichaam op een lichaam inwerkt, zeggen natuurkundigen dat er door dat andere lichaam een kracht op het gegeven lichaam wordt uitgeoefend.
Kracht is een fysieke grootheid die de werking van het ene lichaam op het andere kenmerkt.
Kracht wordt aangegeven met een Latijnse letter F, en de krachteenheid wordt genoemd ter ere van de Engelse natuurkundige Isaac Newton Newton(we schrijven met een kleine letter!) en wordt aangeduid met N (we schrijven met een hoofdletter, aangezien de eenheid naar de wetenschapper is vernoemd). Dus,
Samen met de Newton worden meerdere en submeerdere krachteenheden gebruikt:
kilonewton 1 kN = 1000 N;
meganewton 1 MN = 1.000.000 N;
millinewton 1 mN = 0,001 N;
micronewton 1 µN = 0,000001 N, enz.
Onder invloed van een kracht verandert de snelheid van een lichaam. Met andere woorden, het lichaam begint niet gelijkmatig te bewegen, maar versneld. Preciezer, gelijkmatig versneld: over gelijke tijdsperioden verandert de snelheid van een lichaam in gelijke mate. Precies snelheid verandering lichamen onder invloed van kracht worden door natuurkundigen gebruikt om de eenheid van kracht in 1 N te bepalen.
Meeteenheden van nieuwe fysieke grootheden worden uitgedrukt in de zogenaamde basiseenheden: eenheden van massa, lengte, tijd. In het SI-systeem zijn dit kilogram, meter en seconde.
Laat, onder invloed van enige kracht, de snelheid van het lichaam toenemen met een gewicht van 1 kg verandert zijn snelheid met 1 m/s per seconde. Het is dit soort kracht dat wordt opgevat als 1 newton.
Eén Newton (1N) is de kracht waaronder een massalichaam 1 kg verandert zijn snelheid naar 1 m/sec elke seconde.
Experimenteel is vastgesteld dat de zwaartekracht die nabij het aardoppervlak inwerkt op een lichaam dat 102 g weegt, gelijk is aan 1 N. De massa van 102 g is ongeveer 1/10 kg, of, om preciezer te zijn,
![]()
Maar dit betekent dat een zwaartekracht van 9,8 N zal inwerken op een lichaam dat 1 kg weegt, dat wil zeggen op een lichaam met een 9,8 keer grotere massa, aan het aardoppervlak voor elke massa moet u de massawaarde (in kg) vermenigvuldigen met de coëfficiënt, die meestal wordt aangegeven met de letter G:
We zien dat deze coëfficiënt numeriek gelijk is aan de zwaartekracht die inwerkt op een lichaam dat 1 kg weegt. Het heet versnelling van de zwaartekracht . De oorsprong van de naam hangt nauw samen met de definitie van kracht van 1 newton. Als er op een lichaam van 1 kg een kracht van niet 1 N, maar van 9,8 N rust, dan zal het lichaam onder invloed van deze kracht zijn snelheid niet met 1 m/s, maar met 9,8 veranderen (accelereren). m/s per seconde. Op de middelbare school zal dit onderwerp in meer detail worden besproken.
Nu kunnen we een formule schrijven waarmee we de zwaartekracht kunnen berekenen die op een lichaam met willekeurige massa inwerkt M(Figuur 1).

Rijst. 1. Formule voor het berekenen van de zwaartekracht
Je moet weten dat de versnelling van de zwaartekracht alleen aan het aardoppervlak 9,8 N/kg bedraagt en afneemt met de hoogte. Op een hoogte van 6400 km boven de aarde is dit bijvoorbeeld 4 keer minder. Bij het oplossen van problemen zullen we deze afhankelijkheid echter verwaarlozen. Bovendien werkt de zwaartekracht ook op de maan en andere hemellichamen, en op elk hemellichaam heeft de versnelling van de zwaartekracht zijn eigen betekenis.
In de praktijk is het vaak nodig om kracht te meten. Hiervoor wordt een apparaat gebruikt dat een rollenbank wordt genoemd. De basis van de rollenbank is een veer waarop de gemeten kracht wordt uitgeoefend. Elke rollenbank heeft naast de veer een schaal waarop krachtwaarden worden aangegeven. Eén van de uiteinden van de veer is voorzien van een pijl, die op de schaal aangeeft welke kracht er op de rollenbank wordt uitgeoefend (Fig. 2).

Rijst. 2. Rollenbank
Afhankelijk van de elastische eigenschappen van de veer die in de rollenbank wordt gebruikt (de stijfheid ervan), kan de veer onder invloed van dezelfde kracht meer of minder uitrekken. Dit maakt het mogelijk om rollenbanken met verschillende meetlimieten te produceren (Fig. 3).

Rijst. 3. Rollenbanken met meetlimieten van 2 N en 1 N
Er zijn rollenbanken met een meetlimiet van enkele kilonewton of meer. Ze gebruiken een veer met een zeer hoge stijfheid (Fig. 4).

Rijst. 4. Rollenbank met een meetlimiet van 2 kN
Als u een last aan een rollenbank hangt, kunt u op basis van de aflezingen van de rollenbank de massa van de last bepalen. Als een rollenbank waaraan een last hangt bijvoorbeeld een kracht van 1 N vertoont, dan is de massa van de last 102 g.
Laten we aandacht besteden aan het feit dat kracht niet alleen een numerieke waarde heeft, maar ook een richting. Dergelijke grootheden worden vectorgrootheden genoemd. Snelheid is bijvoorbeeld een vectorgrootheid. Kracht is ook een vectorgrootheid (ze zeggen ook dat kracht een vector is).
Beschouw het volgende voorbeeld:
Een lichaam met een massa van 2 kg hangt aan een veer. Het is noodzakelijk om de zwaartekracht weer te geven waarmee de aarde dit lichaam en het gewicht van het lichaam aantrekt.
Bedenk dat de zwaartekracht op het lichaam inwerkt, en dat gewicht de kracht is waarmee het lichaam op de ophanging inwerkt. Als de ophanging stilstaat, zijn de numerieke waarde en richting van het gewicht dezelfde als die van de zwaartekracht. Gewicht wordt, net als de zwaartekracht, berekend met behulp van de formule in Fig. 1. De massa van 2 kg moet worden vermenigvuldigd met de zwaartekrachtversnelling van 9,8 N/kg. Omdat de berekeningen niet erg nauwkeurig zijn, wordt vaak aangenomen dat de versnelling van de vrije val 10 N/kg bedraagt. De zwaartekracht en het gewicht zullen dan ongeveer 20 N zijn.
Om de zwaartekracht- en gewichtsvectoren in de figuur weer te geven, is het noodzakelijk om in de figuur een schaal te selecteren en weer te geven in de vorm van een segment dat overeenkomt met een bepaalde krachtwaarde (bijvoorbeeld 10 N).
Laten we het lichaam in de figuur weergeven als een bal. Het aangrijpingspunt van de zwaartekracht is het middelpunt van deze bal. Laten we de kracht weergeven als een pijl, waarvan het begin zich bevindt op het punt waarop de kracht wordt uitgeoefend. Laten we de pijl verticaal naar beneden richten, aangezien de zwaartekracht naar het midden van de aarde is gericht. De lengte van de pijl is, in overeenstemming met de geselecteerde schaal, gelijk aan twee segmenten. Naast de pijl tekenen we de letter, die de zwaartekracht aangeeft. Omdat we in de tekening de richting van de kracht hebben aangegeven, is er een kleine pijl boven de letter geplaatst om te benadrukken wat we weergeven vector maat.
Omdat het lichaamsgewicht op de ophanging wordt uitgeoefend, wordt het begin van de pijl die het gewicht voorstelt onderaan de ophanging geplaatst. Bij het afbeelden respecteren wij ook de schaal. Plaats de letter ernaast, geef het gewicht aan en vergeet niet een pijltje boven de letter te plaatsen.
De volledige oplossing voor het probleem ziet er als volgt uit (Fig. 5).

Rijst. 5. Geformaliseerde oplossing voor het probleem
Houd er nogmaals rekening mee dat in het hierboven besproken probleem de numerieke waarden en richtingen van zwaartekracht en gewicht hetzelfde bleken te zijn, maar de toepassingspunten waren anders.
Bij het berekenen en weergeven van een kracht moet rekening worden gehouden met drie factoren:
· numerieke waarde (modulus) van kracht;
· richting van de kracht;
· punt van toepassing van kracht.
Kracht is een fysieke grootheid die de werking van het ene lichaam op het andere beschrijft. Meestal wordt dit aangegeven met een letter F. De eenheid van kracht is newton. Om de waarde van de zwaartekracht te berekenen, is het noodzakelijk om de versnelling van de zwaartekracht te kennen, die aan het aardoppervlak 9,8 N/kg bedraagt. Met zo'n kracht trekt de aarde een lichaam aan dat 1 kg weegt. Bij het weergeven van een kracht moet rekening worden gehouden met de numerieke waarde, richting en toepassingspunt ervan.
Bibliografie
- Peryshkin A.V. Groep 7 - 14e druk, stereotype. - M.: Trap, 2010.
- Peryshkin A.V. Verzameling van problemen in de natuurkunde, groep 7-9: 5e druk, stereotype. - M: Uitgeverij “Examen”, 2010.
- Lukashik VI, Ivanova E.V. Verzameling van problemen in de natuurkunde voor de klassen 7-9 van onderwijsinstellingen. - 17e druk. - M.: Onderwijs, 2004.
- Uniforme verzameling digitale leermiddelen ().
- Uniforme verzameling digitale leermiddelen ().
- Uniforme verzameling digitale leermiddelen ().
Huiswerk
- Lukashik V. I., Ivanova E. V. Verzameling van problemen in de natuurkunde voor de klassen 7-9 nr. 327, 335-338, 351.